Matematika Teknik II: 223 Kalkulus Vektor - Persamaan Parametrik Kurva dalam Ruang
Summary
TLDRThis video discusses vector calculus, focusing on representing parametric equations of curves in three-dimensional space. It starts by reviewing scalar and vector fields and then illustrates how to express curves parametrically using examples like circles and ellipses. The presentation covers the importance of time as a parameter and demonstrates how to derive velocity and acceleration from position equations. Through visual aids and mathematical formulas, the video effectively conveys the relationship between geometry and calculus, making complex concepts accessible to learners interested in mathematical modeling of motion and curves.
Takeaways
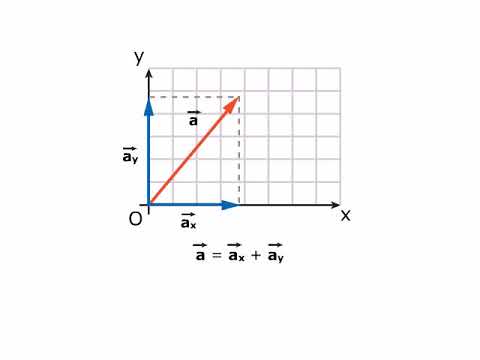
- 😀 Vector calculus involves scalar and vector functions, which are fundamental in describing motion and fields in space.
- 😀 A curve in three-dimensional space can be expressed using parametric equations, typically defined in terms of a parameter like time (t).
- 😀 The parametric equations for a circle are given by x(t) = a * cos(ωt) and y(t) = a * sin(ωt), where 'a' is the radius and 'ω' relates to angular speed.
- 😀 For an ellipse, the parametric equations are x(t) = a * cos(t) and y(t) = b * sin(t), reflecting its major and minor axes.
- 😀 The concept of velocity in physics is derived from the parametric equations by taking the derivative of the position function with respect to time.
- 😀 Acceleration can also be obtained by differentiating the velocity function, illustrating the change in motion over time.
- 😀 The helix is represented by the equations x(t) = a * cos(ωt), y(t) = a * sin(ωt), and z(t) = ct, combining circular motion and vertical ascent.
- 😀 Understanding how to derive parametric equations is essential for analyzing the paths of particles and their movements.
- 😀 The relationship between position, velocity, and acceleration is crucial for solving problems related to motion in physics.
- 😀 Overall, mastering parametric equations enhances the ability to express and understand complex curves and their dynamics in both mathematics and physics.
Q & A
What is the primary focus of the lecture on vector calculus?
-The lecture primarily focuses on representing curves in three-dimensional space using parametric equations and understanding the relationship between position, velocity, and acceleration.
What are scalar and vector functions?
-Scalar functions return a single value, while vector functions return a vector that can represent quantities such as position in space.
How are parametric equations defined in the context of curves?
-Parametric equations define the coordinates of points on a curve as functions of a parameter, typically denoted as 't', allowing for a more comprehensive representation of motion.
What are the parametric equations for a circle?
-The parametric equations for a circle of radius 'a' centered at the origin are: x(t) = a cos(ωt) and y(t) = a sin(ωt), where 'ω' represents the angular speed.
How does the lecture derive the parametric equations for an ellipse?
-The lecture derives the parametric equations for an ellipse centered at the origin with semi-major axis 'a' and semi-minor axis 'b' as: x(t) = a cos(ωt) and y(t) = b sin(ωt).
What does the parameter 't' represent in parametric equations?
-'t' typically represents time, which allows the equations to describe how the position changes over time.
Can you explain how to find velocity from parametric equations?
-Velocity can be found by taking the derivative of the position vector with respect to time. For instance, if R(t) = (x(t), y(t), z(t)), then the velocity V(t) = dR/dt.
What are the parametric equations for a helical curve?
-The parametric equations for a helix are: x(t) = a cos(ωt), y(t) = a sin(ωt), and z(t) = kt, where 'k' is a constant that determines the rate of vertical ascent.
How does the lecture illustrate the relationship between position and acceleration?
-The lecture explains that acceleration is the derivative of the velocity vector, which in turn is the derivative of the position vector. This demonstrates how changes in position relate to changes in velocity and acceleration.
Why are parametric equations beneficial for representing curves in three-dimensional space?
-Parametric equations are beneficial because they allow for a clear representation of curves without needing to express y explicitly in terms of x, making it easier to analyze complex shapes and motions.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video
TEORIA Versori e componenti cartesiane di un vettore AMALDI ZANICHELLI
Geometria Analitica nello Spazio : Equazione Parametrica della Retta

25 Desember 2024

Edexcel Further Pure 1: Vectors 2-2
Matematika SMA - Vektor (5) - Vektor Dimensi 3, Operasi Vektor Dimensi 3 (Y)
Div, Grad, and Curl: Vector Calculus Building Blocks for PDEs [Divergence, Gradient, and Curl]
5.0 / 5 (0 votes)