Behavior Trees in Robotics (Part 1 - Concept)
Summary
TLDRThis video delves into behavior trees, a critical tool in robotics and game engines, offering a solution to the limitations of finite state machines (FSMs). It explains the concept of behavior trees, their components, and how they address issues like reactivity and modularity. The video contrasts FSMs with behavior trees, highlighting the latter's scalability and adaptability for complex systems. It also previews upcoming content, which includes coding a behavior tree using the open-source library behavior.cpp in C++.
Takeaways
- 🌳 Behavior Trees are a method used in robotics and game engines to manage and structure tasks for autonomous agents.
- 🔄 Before Behavior Trees, Finite State Machines (FSMs) were predominant, but they had limitations that led to the development of Behavior Trees.
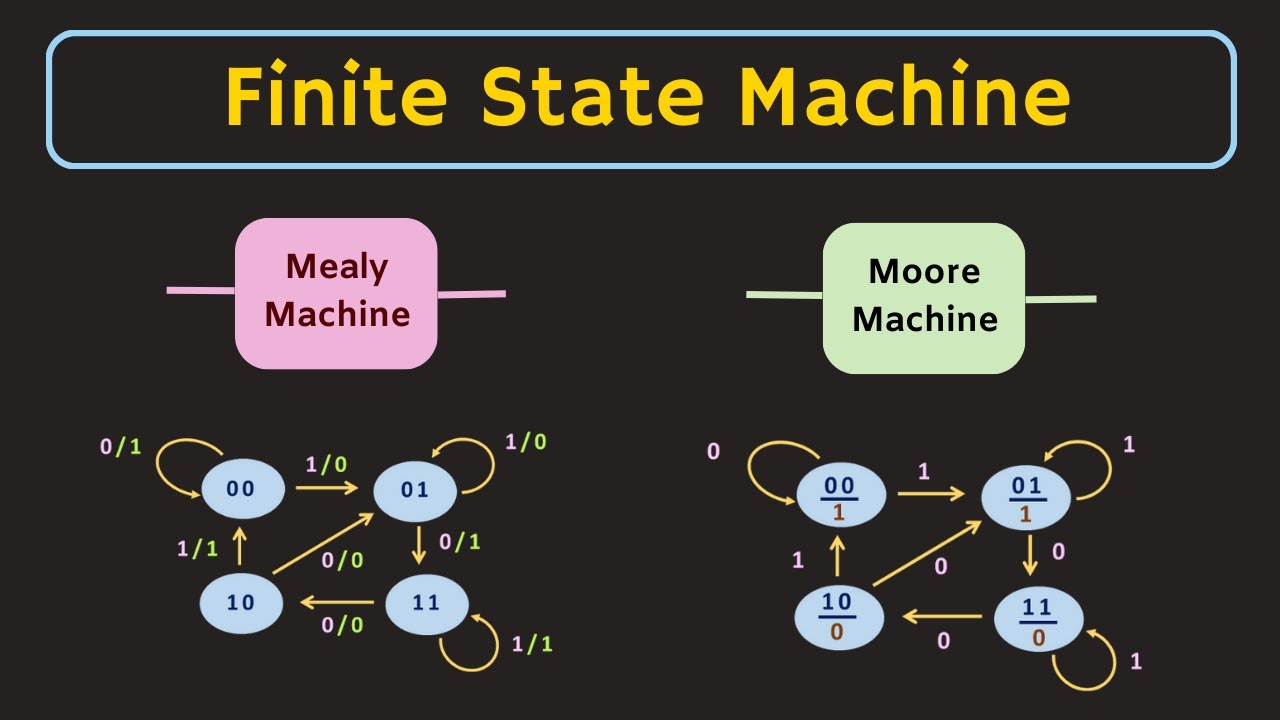
- 🤖 FSMs have a finite number of sequential states, which can become complex and hard to manage as the number of states and transitions increase.
- 🔄 The two main issues with FSMs are their lack of reactivity to unexpected events and poor modularity, making them less scalable for complex systems.
- 🌟 Behavior Trees offer improved reactivity and modularity, allowing for easier handling of complex scenarios and better code reuse.
- 📚 Behavior Trees consist of control flow nodes (like sequences, fallbacks, and decorators) and execution nodes (actions and conditions), which provide structure and functionality.
- 🔄 A Behavior Tree is executed from the root node through a process called 'ticking', which propagates down the tree based on node types and outcomes.
- 🔄 The video provides a detailed example of a robot's Behavior Tree for finding, grasping, and disposing of a ball, illustrating the tree's reactivity in action.
- 🔄 Behavior Trees are particularly useful in robotics for their ability to handle complex and dynamic environments more effectively than FSMs.
- 🛠️ The video series will proceed to code a Behavior Tree from scratch using an open-source library called behavior.cpp, demonstrating practical implementation.
Q & A
What is the main topic of the video?
-The main topic of the video is to explain what Behavior Trees are, their origin, and the advantages of using them in robotics and game engines.
Why were Behavior Trees introduced?
-Behavior Trees were introduced to address the limitations of Finite State Machines (FSMs), particularly in terms of reactivity and modularity, which FSMs struggled with as systems became more complex.
What is a Finite State Machine (FSM)?
-A Finite State Machine (FSM) is an abstract machine with a finite number of sequential states. It transitions between these states based on inputs and the current state.
What are the two main problems with FSMs?
-The two main problems with FSMs are reactivity and modularity. FSMs are not reactive enough to handle unexpected situations or corner cases, and they lack modularity, making it difficult to reuse states in different contexts without modifications.
How does a Behavior Tree differ from an FSM in terms of reactivity?
-Behavior Trees are more reactive than FSMs because they can handle unexpected situations by continuously ticking all nodes to the left of the currently executing node, allowing for dynamic responses to changes in the environment.
What are the basic building blocks of a Behavior Tree?
-The basic building blocks of a Behavior Tree are internal nodes called control flow nodes and leaf nodes called execution nodes. Control flow nodes include sequence, fallback, parallel, and decorator nodes, while execution nodes include action and condition nodes.
What is a 'tick' in the context of Behavior Trees?
-A 'tick' in Behavior Trees is a signal or nudge that starts the execution from the root node and is propagated through the tree, allowing nodes to execute if they are in the active state.
How does modularity in Behavior Trees solve the problem faced by FSMs?
-Modularity in Behavior Trees allows for the reuse of subtrees independently of the rest of the tree, as each subtree is decoupled from others. This makes it easier to reuse and modify behavior without affecting other parts of the system.
What is the role of a sequence node in a Behavior Tree?
-A sequence node in a Behavior Tree ticks its children from left to right and requires all children to return success for the sequence node to be successful. If any child returns running or failure, the sequence node will return the same status.
What is the role of a fallback node in a Behavior Tree?
-A fallback node in a Behavior Tree ticks its children from left to right and will return success or running as soon as one child returns either of these statuses. If all children return failure, the fallback node will also return failure.
What is the difference between an action node and a condition node in a Behavior Tree?
-An action node in a Behavior Tree is responsible for executing an action and returns success, failure, or running based on the action's outcome. A condition node checks for a condition and returns success or failure based on whether the condition is met or not.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video

Finite State Machines in Godot 4 in Under 10 Minutes
Finite State Machine Explained | Mealy Machine and Moore Machine | What is State Diagram ?

Chapter 4 - Video 1 - Intro Kecerdasan Buatan pada Game

Why is It Difficult to Make Good AI for Games? | AI 101

If We Plant 1 TRILLION Trees Can We Stop Climate Change?

FSE100 - Using and Creating Models
5.0 / 5 (0 votes)