1 1 3 Lecture Video 1 of 4 Intro to the Homogeneous Transformation Matrix
Summary
TLDRThis video discusses forward kinematics in robotics, focusing on how to calculate the position of the end effector using the angles of the joints. The challenge is that the controller directly adjusts the joint angles, not the end effector's position. The key to solving this problem lies in using the homogeneous transformation matrix, which encodes both rotation and displacement between frames. The video outlines how to construct the matrix and use it to track the end effector's location, with future videos delving into how to compute the rotation matrix and displacement vector for two frames.
Takeaways
- 😀 The articulated manipulator allows control over individual joints, but not the end effector's position directly.
- 😀 Forward kinematics is the process of determining the end effector's location based on joint angles.
- 😀 The goal of forward kinematics is to avoid undesirable outcomes like collisions by knowing the end effector's position.
- 😀 The key to solving forward kinematics is using a homogeneous transformation matrix.
- 😀 A homogeneous transformation matrix has 4 rows and 4 columns, representing both rotation and displacement.
- 😀 The 3x3 section of the homogeneous matrix encodes the rotation between frames in the manipulator.
- 😀 The 3x1 displacement vector in the matrix indicates how one frame is displaced relative to another.
- 😀 The rest of the homogeneous matrix is filled with zeros and ones to ensure it’s square (4x4).
- 😀 Once the rotation matrix and displacement vector are known, the end effector’s location can be calculated for any joint angles.
- 😀 The next steps will focus on how to calculate the rotation matrix and displacement vector in kinematic diagrams.
- 😀 The final goal is to use the homogeneous transformation matrix to precisely calculate the end effector's position in space.
Q & A
What is forward kinematics in robotics?
-Forward kinematics is the problem of determining the position and orientation of the end effector (e.g., a robotic hand or tool) based on the known angles of the joints in a manipulator. The goal is to calculate where the end effector is in space given the angles of all the joints.
Why is controlling the angles of individual joints important in robotics?
-Controlling the angles of individual joints is important because the position of the end effector depends on these angles. By adjusting the joint angles, we can control where the end effector moves, ensuring it doesn't collide with objects or reach undesirable positions.
What problem does forward kinematics solve?
-Forward kinematics solves the problem of determining the location of the end effector in space based on the joint angles of a robotic manipulator. This allows for precise control over the manipulator's movements and avoids undesirable positions, like colliding with objects.
What is the homogeneous transformation matrix?
-The homogeneous transformation matrix is a 4x4 matrix used in robotics to describe the transformation (rotation and displacement) between different frames in the manipulator. It encodes both the rotation of one frame relative to another and the displacement of one frame relative to the other.
What is the structure of the homogeneous transformation matrix?
-The homogeneous transformation matrix consists of a 3x3 rotation matrix, a 3x1 displacement vector, and a final row of three zeros with a one in the bottom-right corner to make the matrix 4x4. The rotation matrix represents rotational transformation, while the displacement vector represents translational displacement.
How does the 3x3 rotation matrix function in the homogeneous transformation matrix?
-The 3x3 rotation matrix in the homogeneous transformation matrix describes the rotation of one frame relative to another. It encodes the orientation change that occurs when transitioning from one frame of reference to another.
What does the 3x1 displacement vector represent in the homogeneous transformation matrix?
-The 3x1 displacement vector in the homogeneous transformation matrix represents the translation or displacement between two frames of reference. It tells us how much one frame is displaced relative to the other in 3D space.
Why is the homogeneous transformation matrix 4x4?
-The homogeneous transformation matrix is 4x4 to allow for both rotational and translational transformations in a unified framework. The last row and column are filled with zeros and a one to ensure the matrix is square, facilitating matrix operations in 3D space.
What will be covered in the next videos after this one?
-In the next video, the focus will be on how to calculate the rotation matrix for two frames in the kinematic diagram. The video after that will cover how to find the displacement vector for two frames. Finally, examples of how to combine these elements into a complete homogeneous transformation matrix will be discussed.
How can forward kinematics help avoid undesirable positions in robotic manipulators?
-By calculating the end effector's position through forward kinematics, the robot can avoid sending commands that place the end effector in undesirable positions, such as colliding with the table. This ensures precise control and safe operation of the manipulator.
Outlines

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифMindmap

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифKeywords

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифHighlights

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифTranscripts

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тариф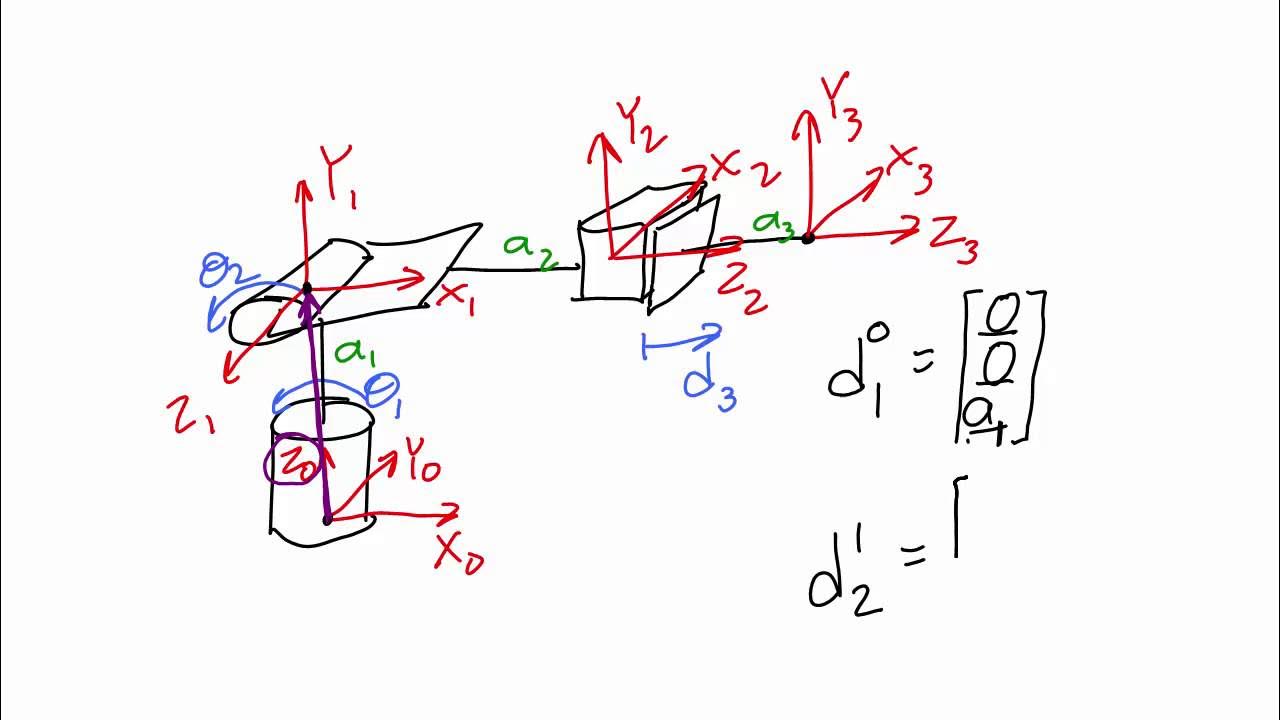

5.0 / 5 (0 votes)
