Pulse-Doppler Radar | Understanding Radar Principles
Summary
TLDRThis video offers an insightful introduction to pulsed Doppler radar, explaining how to determine range and radial velocity using radar pulses. It covers the basics of pulse transmission, signal reflection, and the use of matched filters to enhance signal-to-noise ratio. The video also demonstrates how integrating multiple pulses can improve detection and illustrates the process of calculating range and velocity, setting the stage for further exploration of phased array antennas and the data cube in subsequent tech talks.
Takeaways
- 📡 The video introduces pulsed Doppler radar and its use for determining range and radial velocity using radar pulses.
- 🔊 Pulse radar systems transmit high-energy bursts of waves followed by silent periods for receiving reflected signals.
- 📶 The transmitted waveform in pulsed radar includes a period of silence and a pulse width, which in the example is one microsecond at a fixed frequency of 2.8 GHz.
- 🚀 To avoid ambiguity, the radar must allow time for the pulse to reflect off an object and return before the next pulse is sent.
- 📍 The maximum unambiguous range is determined by the pulse repetition frequency (PRF) and pulse width, which in the example is under 150 kilometers.
- 🔄 The reflected signal's frequency is shifted if the object has radial velocity, and this shift can be used to determine the object's velocity.
- 📊 To determine range, the time between the transmission and return of the pulse is measured, with considerations for the pulse width and signal-to-noise ratio.
- 🔍 A matched filter is used to amplify the signal relative to the noise and narrow the pulse, improving the signal-to-noise ratio (SNR) and making the signal peak easier to detect.
- 🔢 Pulse integration involves summing multiple pulses to increase the SNR and help the signal rise above the detectability threshold.
- 🔄 To measure radial velocity, the phase shift between successive pulses is compared, with the frequency of the sampled signal indicating the object's speed.
- 🌐 The max unambiguous velocity is the speed at which the Doppler frequency starts to decrease again due to the delay between pulses exceeding half a wavelength.
- 📈 The video concludes by discussing how pulsed Doppler radar can handle multiple objects in the field of view and how the data can be visualized in a 'data cube' for range, velocity, and direction analysis.
Q & A
What is the main topic of the video?
-The video introduces pulsed Doppler radar and explains how to determine range and radial velocity using a series of radar pulses.
How does a pulse radar system operate?
-A pulse radar system operates by sending out short bursts or pulses of high-energy waves followed by long periods of silence where the receiver listens for the reflected signal.
What is the purpose of the pulse width in a radar system?
-The pulse width determines the amount of time the radar transmits a constant frequency signal, which in the example given is one microsecond.
Why is there a need for a time gap between successive radar pulses?
-The time gap between pulses ensures that the reflected signal from one pulse can return to the radar before the next pulse is sent, avoiding ambiguity about which pulse the echo belongs to.
What is the maximum unambiguous range of a radar system with a pulse repetition frequency (PRF) of one kilohertz and a pulse width of one microsecond?
-The maximum unambiguous range for such a system is just under 150 kilometers, as light travels about 300 kilometers in the 999 microseconds of dead time between pulses.
How is the range to an object calculated in a pulsed radar system?
-The range is calculated by determining the round-trip distance that light would have traveled in the time between when the pulse was sent and when it returned.
What is the significance of the signal-to-noise ratio (SNR) in radar detection?
-The SNR is crucial for determining the threshold at which an object is detectable, balancing the probability of false detection with the ability to detect actual signals.
What is a matched filter and how does it improve radar signal detection?
-A matched filter is a signal processing technique that amplifies the signal relative to the noise by correlating the transmitted pulse pattern with the received signal, thus improving the signal-to-noise ratio and making the signal peak easier to detect.
How does pulse integration help in detecting signals from distant objects?
-Pulse integration involves summing the energy from multiple pulses, which helps to raise the signal above the detectability threshold by averaging out the uncorrelated noise and enhancing the correlated signal.
How can the radial velocity of an object be determined using pulsed Doppler radar?
-The radial velocity is determined by comparing the phase shift or frequency shift between successive pulses reflected off the moving object, with the change in frequency indicating the object's velocity.
What is the max unambiguous velocity of a radar system, and how is it related to the radar's operating frequency?
-The max unambiguous velocity is the velocity that produces exactly half a wavelength of delay between pulses. It is related to the operating frequency of the radar, as the half-wavelength determines the maximum distance an object can travel between pulses without causing ambiguity in velocity measurement.
What is the concept of radar blind speed, and how does it relate to the radar's transmit signal wavelength?
-Radar blind speed refers to velocities that produce integer multiples of the wavelength of the transmit signal, causing the sampled signal frequency to be 0 Hertz and making the object appear stationary. This occurs when the object's speed is such that the delay between pulses aligns with the wavelength, masking the object's motion.
What is a data cube in the context of radar systems, and how is it used?
-A data cube is a three-dimensional representation of radar data, with axes for range, radial velocity, and direction. It is used to determine these three parameters for objects within the radar's field of view, providing a comprehensive understanding of their positions and movements.
Outlines

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードMindmap

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードKeywords

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードHighlights

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードTranscripts

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレード関連動画をさらに表示
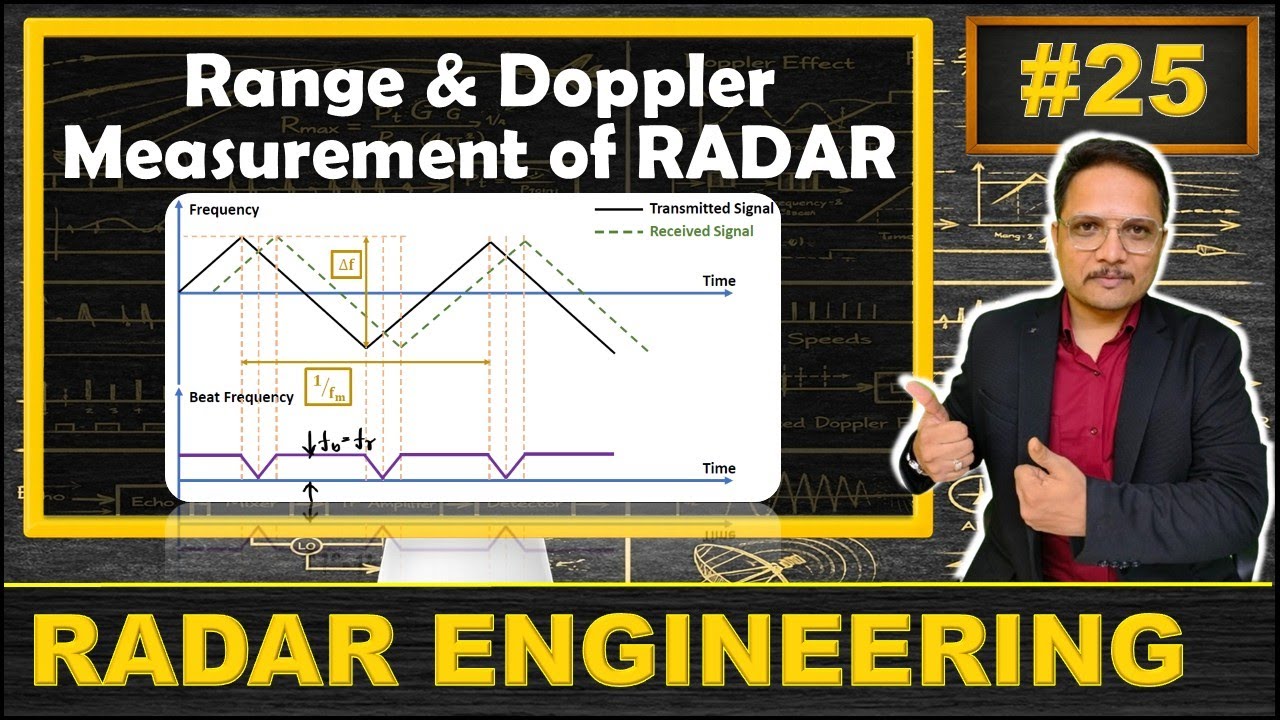
Range and Doppler Measurement of RADAR (Basics, Range & Doppler Calculation) Explained

Doppler Radar Explained | How Radar Works | Part 3
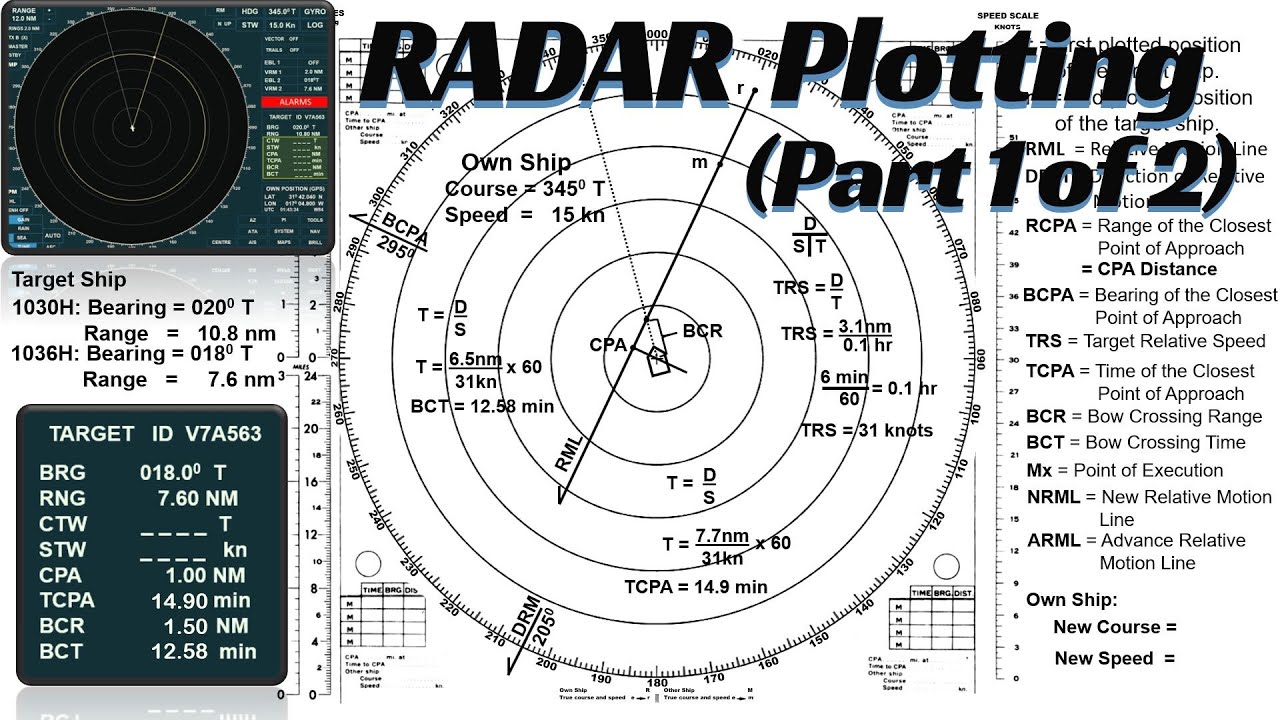
Radar Plotting (Part 1 of 2): Determine CPA, TCPA, BCPA, BCR, BCT, DRM & RS | with a 6-Minute Rule

Radar Signal Processing

Presentasi Fisika-Pemanfaatan Gelombang Mikro

Radar Detectors 101: Beginners Guide
5.0 / 5 (0 votes)
