Matrices de rotación en 3D de x, y, z
Summary
TLDREl guion ofrece una explicación detallada sobre cómo obtener las matrices de rotación en tres dimensiones para cada eje. Se describe el proceso de proyección de los ejes de un sistema de coordenadas girado sobre otro, utilizando vectores unitarios y el producto punto para construir las matrices de rotación. Además, se mencionan las propiedades de estas matrices, como la transposición para obtener la inversa y la descomposición de rotaciones en ejes individuales.
Takeaways
- 📐 Se discute cómo obtener la matriz de rotación en tres dimensiones y para cada eje específico.
- 🎯 Se presenta una trama absoluta como sistema de coordenadas base para la demostración.
- 🔄 Se describe el proceso de obtener un nuevo sistema de coordenadas girado y desfasado en relación a la trama absoluta.
- 📝 Se identifican los ejes de los sistemas de coordenadas con subíndices correspondientes a cada trama.
- 📍 Se trabaja con vectores unitarios y se proyectan estos con respecto a los ejes de las tramas.
- 📚 Se define la matriz de rotación en términos de proyecciones de vectores unitarios entre diferentes sistemas de coordenadas.
- 🧭 Se utiliza el producto punto para determinar las componentes de la matriz de rotación.
- 🔄 Se mencionan las propiedades de la matriz de rotación, incluida su transposición para obtener la inversa.
- 📈 Se describe el proceso de descomposición de rotaciones compuestas en rotaciones individuales por eje.
- 📊 Se construyen las matrices de rotación para los ejes X, Y y Z, utilizando funciones trigonométricas como el coseno y el seno.
- 🔚 Se concluye el video hablando sobre las tres matrices de rotación individuales y su importancia en la rotación de tramas.
Q & A
¿Qué es una matriz de rotación en tres dimensiones?
-Una matriz de rotación en tres dimensiones es una matriz matemática que describe cómo se transforma un sistema de coordenadas al rotar otro sistema de coordenadas con respecto al primero, manteniendo la orientación de los ejes.
¿Cuál es el propósito de obtener una matriz de rotación para cada eje en tres dimensiones?
-El propósito de obtener una matriz de rotación para cada eje es para entender cómo se proyecta cada eje de un sistema de coordenadas en los ejes de otro sistema de coordenadas, lo cual es útil en cálculos de movimientos y transformaciones en el espacio tridimensional.
¿Cómo se define la trama absoluta en el script?
-La trama absoluta es el sistema de coordenadas de referencia, sobre el cual se van a obtener y comparar los nuevos sistemas de coordenadas que están orientados de manera diferente.
¿Qué es el sistema b y cómo se relaciona con la trama absoluta?
-El sistema b es un nuevo sistema de coordenadas que está orientado de manera diferente con respecto a la trama absoluta, y se ha girado un ángulo theta, lo cual se describe en el script como haberse girado 30 grados.
¿Cómo se identifican los ejes de los sistemas de coordenadas en el script?
-Los ejes de los sistemas de coordenadas se identifican con letras mayúsculas y subíndices que representan su correspondencia con la trama o sistema de coordenadas al que pertenecen, como x_a, y_a, z_a para la trama absoluta y x_b, y_b, z_b para el sistema b.
¿Qué son los vectores unitarios y por qué son importantes en este contexto?
-Los vectores unitarios son vectores de longitud igual a 1 en una dirección específica. Son importantes en el contexto de las matrices de rotación porque representan las direcciones de los ejes de los sistemas de coordenadas y se utilizan para calcular las proyecciones de estos ejes en otros sistemas.
¿Cómo se calcula la proyección de un vector unitario con respecto a otro en el script?
-La proyección de un vector unitario con respecto a otro se calcula utilizando el producto punto entre los vectores. Este producto punto da la longitud del segmento de la proyección del primer vector sobre el segundo vector.
¿Qué es el producto punto y cómo se usa para encontrar las proyecciones en las matrices de rotación?
-El producto punto es una operación entre dos vectores que resulta en un escalar y se utiliza para medir la proyección de un vector sobre otro. En el caso de las matrices de rotación, el producto punto se usa para determinar cómo se proyecta cada eje de un sistema de coordenadas en los ejes de otro sistema.
¿Qué propiedades tiene la matriz de rotación según lo descrito en el script?
-Las propiedades de la matriz de rotación incluyen que su inversa es igual a su transpuesta, lo que significa que al rotar un sistema de coordenadas y luego rotarlo de nuevo utilizando la transpuesta de la matriz de rotación, se obtiene el sistema original.
¿Cómo se descompone una rotación compuesta en rotaciones con respecto a cada eje?
-Una rotación compuesta se puede descomponer en rotaciones con respecto a cada eje individual, obteniendo para cada eje una matriz de rotación específica que describe la transformación en esa dirección.
¿Cómo se calcula la matriz de rotación con respecto a un eje específico, como el eje z?
-Para calcular la matriz de rotación con respecto a un eje específico, se analizan las proyecciones de los ejes del sistema de coordenadas que se está rotando (en este caso, el sistema b) sobre los ejes del sistema de coordenadas de referencia (el sistema a). Se utilizan funciones trigonométricas como el coseno y el seno para determinar estas proyecciones.
¿Cuáles son las tres matrices de rotación que se pueden obtener según el script?
-Las tres matrices de rotación que se pueden obtener son la matriz de rotación con respecto al eje z, la matriz de rotación con respecto al eje y y la matriz de rotación con respecto al eje x.
Outlines

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードMindmap

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードKeywords

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードHighlights

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードTranscripts

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレード関連動画をさらに表示
Transformaciones lineales en tres dimensiones | Esencia del álgebra lineal, capítulo 4b

📢 ESPACIOS VECTORIALES de MATRICES💥 Bases y coordenadas. Álgebra Lineal #matematicas
Multiplicación de matrices - Producto de matrices 3x3 | Ejemplo 3

Área de figuras básicas

Círculo de Mohr - Fundamentos y construcción
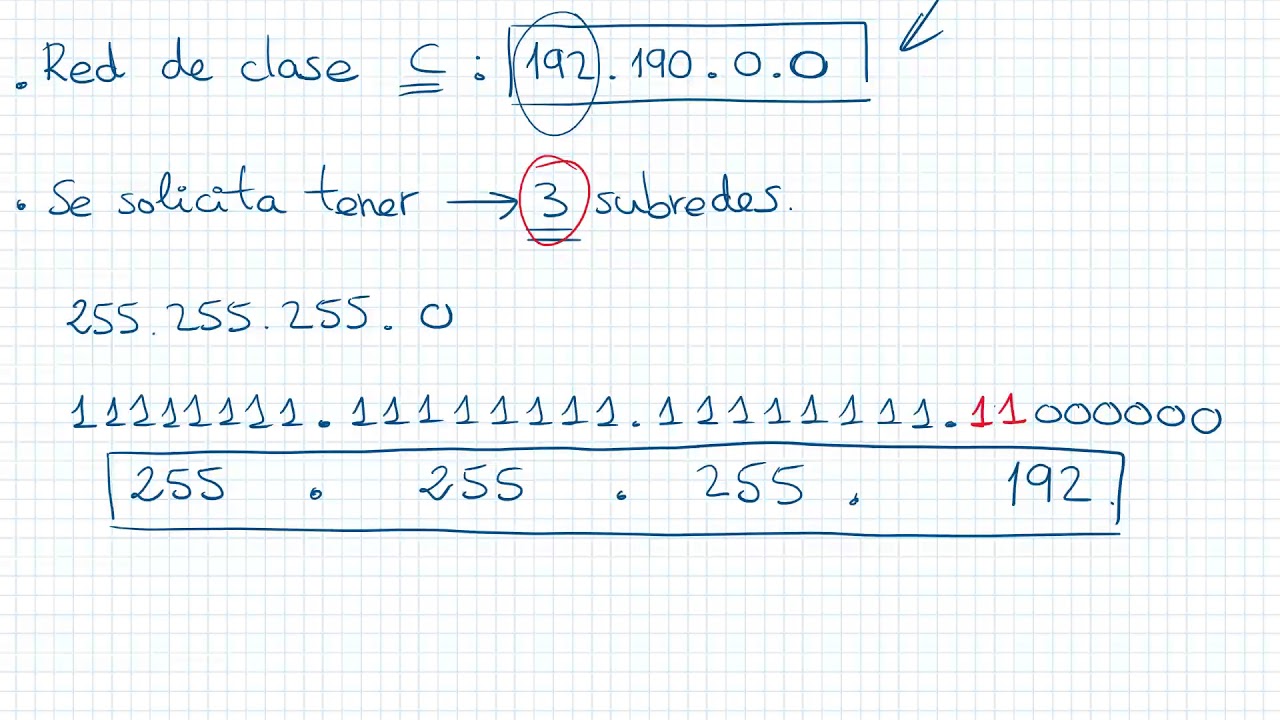
Ejemplo de cálculo de Subredes
5.0 / 5 (0 votes)
