Noise Filtering in PID Control | Understanding PID Control, Part 3
Summary
TLDRThis video explores how sensor noise impacts PID controllers, particularly in the derivative path, and offers solutions to mitigate these effects. Brian from MATLAB Tech Talk explains how high-frequency noise, though small in amplitude, can be amplified by the derivative component, leading to control issues. To address this, a low-pass filter is introduced to attenuate high-frequency noise. The video also discusses how Laplace transforms can be used to implement filters efficiently in PID controllers, and compares two methods of incorporating derivatives in the control system. The next video will cover PID tuning strategies.
Takeaways
- 🤖 The PID controller can become more robust by addressing real-world issues like actuator saturation and sensor noise.
- 🔊 Noise in sensor measurements is inevitable due to environmental factors, electronics, and manufacturing defects, impacting system performance.
- 🎛️ High-frequency noise, even if small, can be amplified by the derivative function in a PID controller, causing significant issues.
- 🎚️ The derivative in PID controllers amplifies high-frequency signals, which can be problematic when sensor noise is involved.
- 📉 A low-pass filter can be applied to the derivative path to attenuate high-frequency noise while allowing low-frequency signals to pass through.
- 🔄 A first-order low-pass filter is simple and effective in reducing high-frequency noise, protecting the system from its negative effects.
- 📐 The choice of cutoff frequency is crucial for the filter to block unwanted noise without affecting the useful signals.
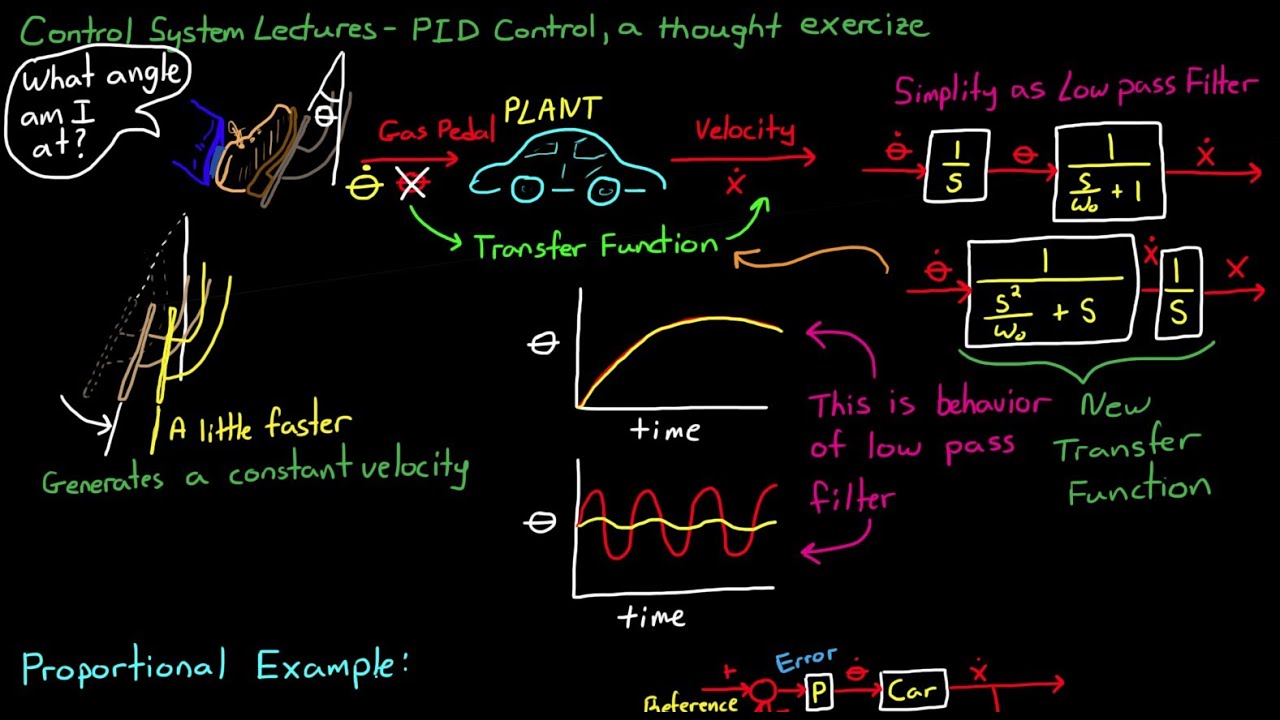
- ⚙️ The derivative portion of the PID controller can be implemented using an integral in the feedback path, offering a more efficient computation.
- 🧮 The transfer function for combining a low-pass filter and derivative is identical to using a feedback loop with an integral.
- 💻 Simulink's PID block includes both derivative gain and a filter coefficient, helping manage high-frequency noise in control systems.
Q & A
What is noise in the context of control systems?
-Noise refers to random disturbances on a signal that can arise from various sources, such as the environment, electronic components, and manufacturing defects. It affects sensor measurements and can impact system control.
How does noise affect a PID controller, particularly the derivative term?
-In a PID controller, the derivative term amplifies high-frequency signals. This means that even small, high-frequency noise can be amplified, leading to instability in the system.
What is white noise, and how does it differ from other types of noise?
-White noise has equal intensity across different frequencies, similar to the static seen or heard on a TV or radio. Other types of noise, like thermal noise, shot noise, and flicker noise, occur due to various physical phenomena and may be concentrated at specific frequencies.
Why is high-frequency noise problematic in control systems?
-High-frequency noise, even at low amplitudes, can have steep slopes, which the derivative term in a PID controller amplifies. This can lead to large erroneous signals that disrupt system performance.
How does the Fourier transform help in understanding noise in a system?
-A Fourier transform decomposes a signal into its constituent sine waves. This makes it easy to see how different frequency components, especially high-frequency noise, affect the system when passed through a derivative.
What is a low-pass filter, and how does it help in noise reduction?
-A low-pass filter attenuates or reduces the amplitude of high-frequency noise while allowing lower-frequency signals, which are typically the desired signals, to pass through mostly unchanged.
What is the cutoff frequency in a low-pass filter, and why is it important?
-The cutoff frequency is the point beyond which the filter begins to attenuate higher frequencies. It’s crucial to set it correctly to remove as much high-frequency noise as possible without affecting the desired signal.
What is the benefit of using a first-order low-pass filter in conjunction with a derivative in a PID controller?
-A first-order low-pass filter reduces high-frequency noise that would otherwise be amplified by the derivative, thus stabilizing the control system without significantly affecting the signal of interest.
What is an alternative way to implement a derivative in a PID controller without explicitly using a derivative operation?
-An alternative method is to use a feedback loop with an integral in the feedback path, which achieves the same effect as a low-pass filter combined with a derivative, but in a more computationally efficient way.
Why might a designer choose to implement a feedback loop with an integral over a low-pass filter and derivative combination?
-The feedback loop with an integral is more computationally efficient, while the explicit low-pass filter and derivative combination is easier to understand and maintain in code. The choice depends on whether the designer prioritizes readability or efficiency.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenant



5.0 / 5 (0 votes)
