Adaptive, Gain-Scheduled and Nonlinear Model Predictive Control | Understanding MPC, Part 4
Summary
TLDRThis video explains how to control systems using Model Predictive Control (MPC), using pancake recipes as an analogy. It covers different MPC approaches: linear MPC for simple, linear systems; adaptive MPC for dynamic systems that can be linearized on the fly; gain-scheduled MPC for systems with varying conditions; and nonlinear MPC for highly nonlinear systems. The video outlines the strengths and challenges of each method, helping viewers understand which MPC technique best suits their system's needs, from straightforward to complex scenarios.
Takeaways
- 😀 Linear MPC is ideal for systems with linear dynamics, where the cost function is quadratic, and constraints are linear, resulting in a convex optimization problem.
- 😀 If your system is nonlinear, you can still use linear MPC methods by linearizing the system at different operating points, though this approximation may not be valid outside the linearized regions.
- 😀 Adaptive MPC updates the plant model in real-time as operating conditions change, maintaining a consistent structure of the optimization problem across different conditions.
- 😀 Gain-scheduled MPC involves creating separate MPC controllers for different operating conditions, each based on a linearized model of the system. These controllers switch depending on the current operating state.
- 😀 While gain-scheduled MPC uses more memory due to multiple independent controllers, it is useful when operating conditions change significantly and independently.
- 😀 Adaptive MPC is recommended if a linear plant model can be obtained at runtime and if the structure of the optimization problem remains consistent across operating conditions.
- 😀 Nonlinear MPC is the most powerful method for controlling highly nonlinear systems, as it uses a nonlinear plant model for more accurate predictions, but solving the optimization problem can be computationally intensive.
- 😀 Nonlinear MPC problems can be nonconvex, with multiple local optima, making it challenging to find the global optimum in real-time.
- 😀 The trade-off in using nonlinear MPC is that, while it provides more accurate control actions, it requires more computational resources to solve the optimization problem.
- 😀 In summary, use linear MPC for simple systems, adaptive MPC for systems with changing conditions, gain-scheduled MPC for systems with highly varying conditions, and nonlinear MPC for systems that cannot be well approximated by linear models.
Q & A
What is the primary concept of Model Predictive Control (MPC)?
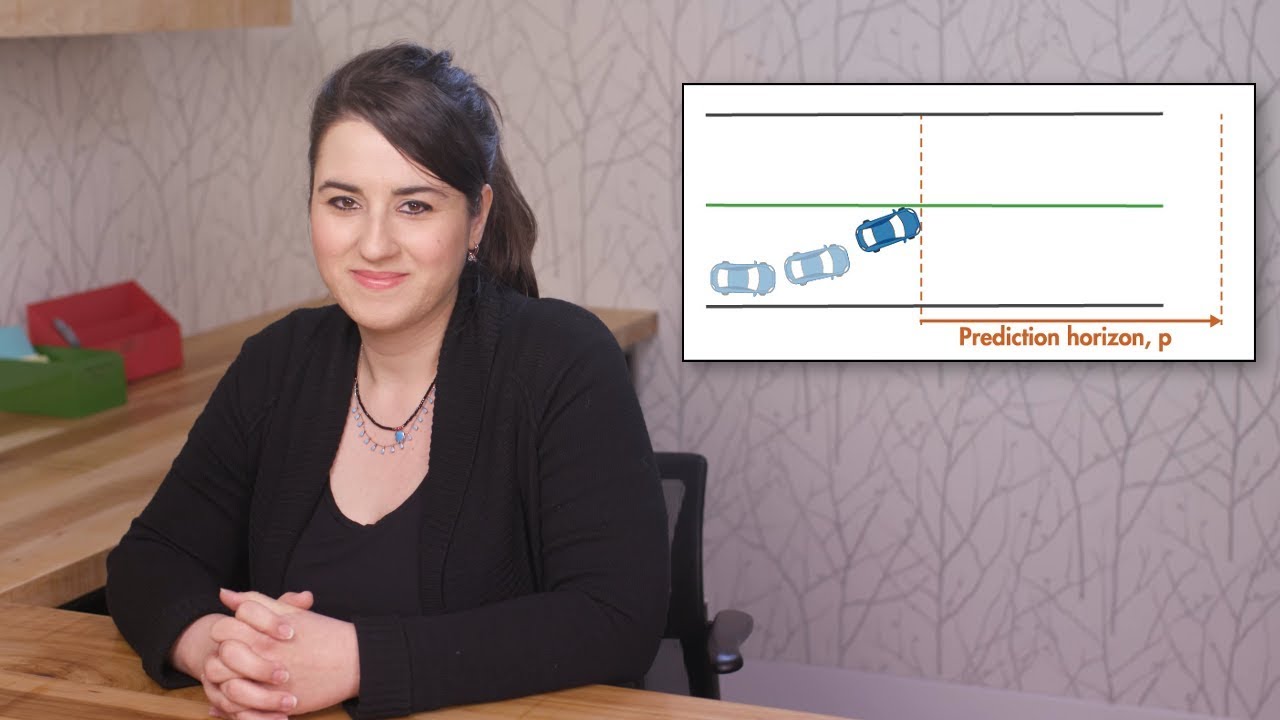
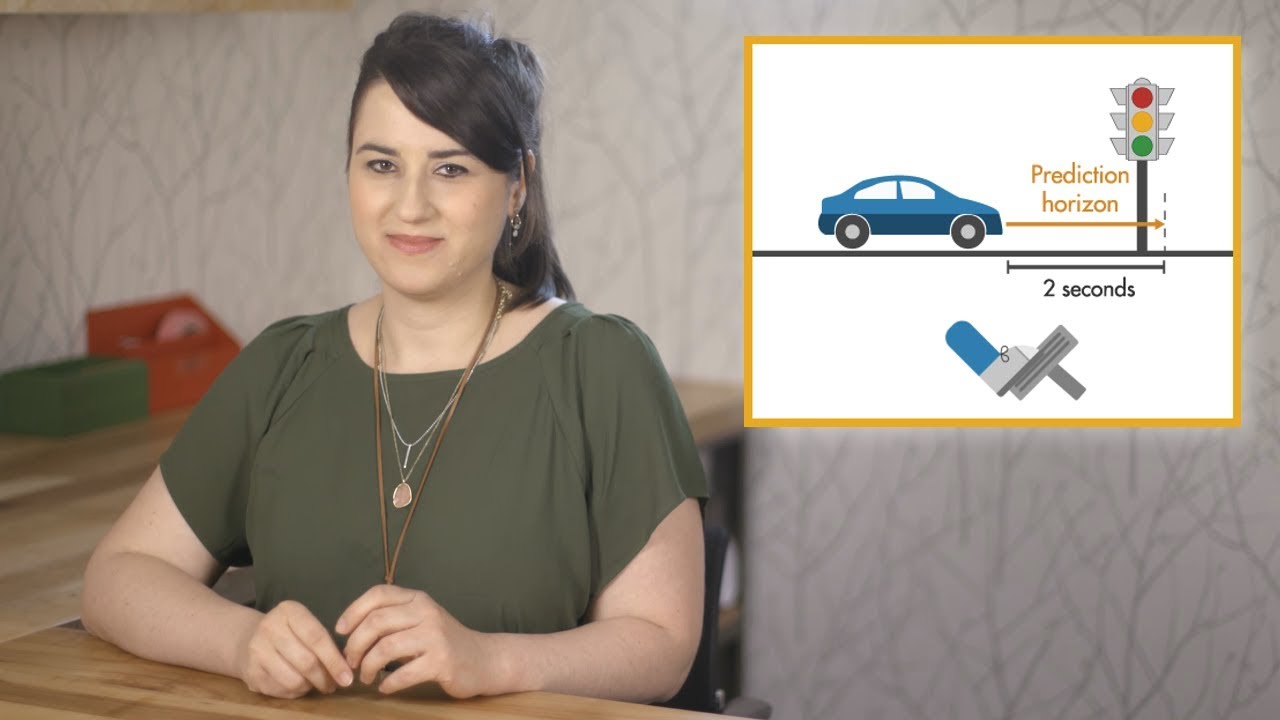
-Model Predictive Control (MPC) is a method of controlling a system where the control action is optimized over a prediction horizon, using a plant model and solving an optimization problem at each time step.
How is the pancake analogy used to explain MPC?
-The pancake analogy is used to illustrate different MPC approaches. Simple pancakes represent linear MPC, while using almond flour or unique ingredients represents the need for adaptive, gain-scheduled, or nonlinear MPC depending on system complexity.
What makes linear MPC easy to implement?
-Linear MPC is easy to implement because it deals with a linear plant model, linear constraints, and a quadratic cost function, which results in a convex optimization problem that can be efficiently solved with well-established numerical methods.
What are the key benefits of using adaptive MPC?
-Adaptive MPC is beneficial when system conditions change over time. It recalculates the internal linear plant model dynamically at each time step, adapting the controller to changing operating conditions while maintaining a constant optimization structure.
How does gain-scheduled MPC differ from adaptive MPC?
-In gain-scheduled MPC, linear models are pre-calculated for various operating points, and a controller switches between them based on system conditions. Unlike adaptive MPC, gain-scheduled MPC requires offline linearization and uses independent controllers for each operating point.
When should gain-scheduled MPC be used instead of adaptive MPC?
-Gain-scheduled MPC should be used when the system’s operating conditions change significantly and the structure of the optimization problem, such as the number of states or constraints, also changes. It is more memory-intensive than adaptive MPC.
What challenges arise when using nonlinear MPC?
-Nonlinear MPC faces challenges due to the nonconvex nature of the optimization problem, where multiple local optima may exist. Solving these problems in real-time is computationally demanding and requires efficient nonlinear solvers.
What is the advantage of using nonlinear MPC over linearized models?
-Nonlinear MPC provides more accurate predictions and control actions because it uses the true nonlinear plant model rather than relying on approximations. This leads to better performance, especially in highly nonlinear systems.
Why is it recommended to use adaptive MPC when possible?
-Adaptive MPC is recommended when the system can be linearly approximated at each time step, and the optimization problem remains consistent across operating conditions. It is more efficient and requires less memory compared to gain-scheduled MPC.
How does the choice of MPC method depend on the system’s nonlinearity?
-If a system is nonlinear but can be well approximated by linear models, adaptive or gain-scheduled MPC are suitable. However, if the system cannot be effectively linearized, nonlinear MPC should be used, despite the computational challenges.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraVer Más Videos Relacionados

How To Run Model Predictive Control Faster | Understanding MPC, Part 5
What is Model Predictive Control? | Understanding MPC, Part 2

Why Use Model Predictive Control? | Understanding MPC, Part 1
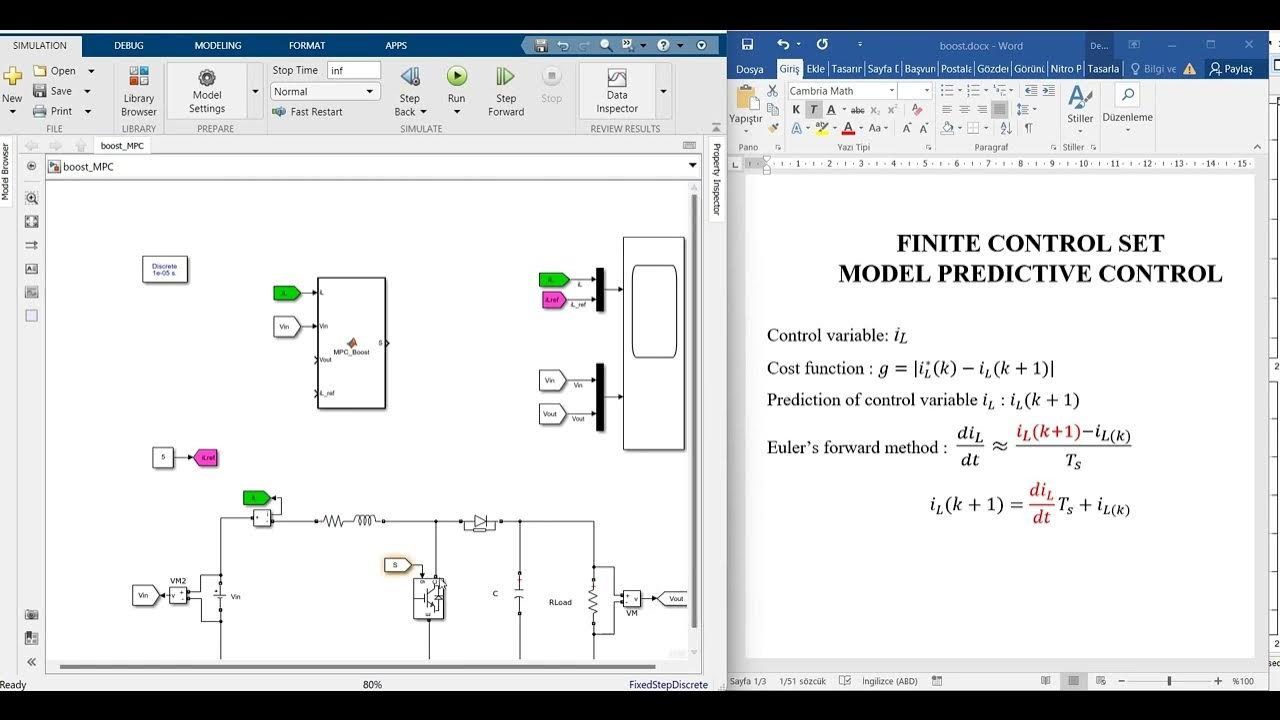
Model Predictive Control of Boost Converter
Model Predictive Control Design Parameters | Understanding MPC, Part 3
MATLAB - SIMULINK (1). SISTEM KENDALI (Part 28)
5.0 / 5 (0 votes)
