Mudah Mengerjakan Soal Kesetimbangan Benda Tegar || Fisika Kelas XI || #OprekMafiki #Stories
Summary
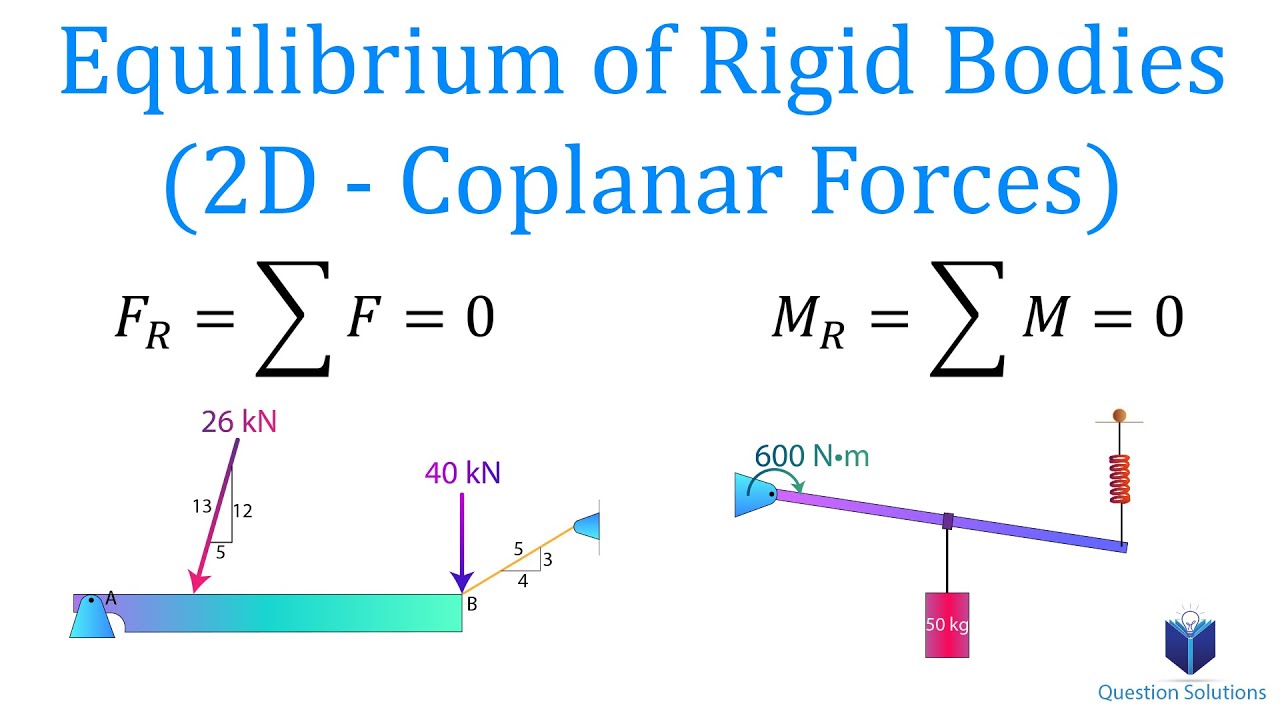
TLDRIn this educational video, the presenter explains how to solve problems related to the equilibrium of rigid bodies. The focus is on three key conditions for equilibrium: the sum of forces in the x and y directions must be zero, and the sum of moments (torques) must also be zero. Through three example problems, viewers are guided step-by-step on how to apply these principles to calculate unknown forces and moments. The problems involve scenarios like balancing wooden beams, calculating the mass of objects, and determining tension in ropes, all while emphasizing the importance of understanding equilibrium concepts in physics.
Takeaways
- 😀 The video explains how to solve rigid body equilibrium problems in physics.
- 😀 There are three conditions for rigid body equilibrium: the sum of torques (moments) is zero, the sum of forces in the x-direction is zero, and the sum of forces in the y-direction is zero.
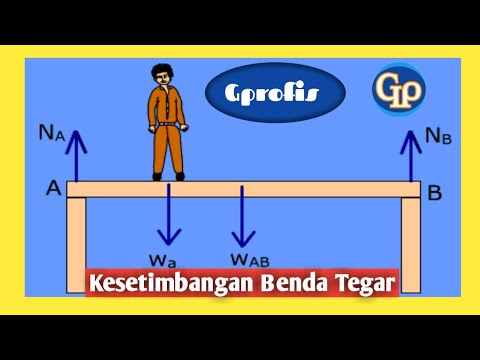
- 😀 In the first example, a homogeneous wooden beam on two supports is analyzed to find the forces at the supports using torque calculations.
- 😀 To simplify torque calculations, the pivot point should be chosen at the location where the unknown force acts, making its torque zero.
- 😀 Torque is calculated as the product of force and the perpendicular distance from the pivot point.
- 😀 The second problem involves a rod and weights where the mass of an object must be determined by balancing torques around a pivot.
- 😀 The third example includes a rod suspended by a tensioned string at an angle, requiring decomposition of the tension into x and y components using trigonometry.
- 😀 For angled forces, sine and cosine functions are used to calculate the contributions of each component to torque and equilibrium equations.
- 😀 Solving these problems involves systematically applying equilibrium equations to calculate unknown forces or masses.
- 😀 The video emphasizes careful selection of pivot points and proper identification of distances to accurately compute torques.
Q & A
What are the three conditions for the equilibrium of a rigid body?
-The three conditions are: 1) The sum of all moments (torques) must be zero, Στ = 0; 2) The sum of all forces in the x-direction must be zero, ΣFx = 0; 3) The sum of all forces in the y-direction must be zero, ΣFy = 0.
In Problem 1, what is the given weight and length of the wooden beam?
-The beam is 8 meters long and has a weight of 200 N.
How is the point of rotation (pivot) chosen when calculating the normal force at a support?
-The pivot point is chosen at the location of the unknown force that we want to eliminate from the torque calculation. For example, to calculate the force at point A, the pivot is chosen at point B so that the torque from NB becomes zero.
How is the torque of a force calculated?
-Torque (τ) is calculated as the product of the force (F) and the perpendicular distance (l) from the pivot to the line of action of the force: τ = F × l.
What is the normal force at support A for the first problem?
-The normal force at support A is 150 N.
In Problem 2, how is the mass of object C calculated?
-By taking the pivot at point O and summing the torques of the known weights and the unknown mass of C, the mass is found to be 2 kg.
What is the importance of choosing a pivot point in torque calculations?
-Choosing the pivot strategically allows you to eliminate unknown forces from the torque equation, simplifying the calculation and making it easier to solve for the remaining unknowns.
How do you account for a force applied at an angle, like a tension T in a rope forming an angle α?
-Decompose the force into its components along the x and y axes. The component perpendicular to the lever arm contributes to torque: for vertical torque, use T_y = T × sin(α).
What is the final tension in the rope in Problem 3?
-The tension in the rope is 65 N.
Why is it important to maintain consistent sign conventions for torque?
-Consistent sign conventions (e.g., clockwise positive, counterclockwise negative) ensure that the sum of torques is correctly calculated, which is critical to accurately solving equilibrium problems.
How can the methods in this video be applied to other rigid body problems?
-The methods are general and can be applied to any rigid body problem involving beams, rods, or structures with forces acting at various points. By choosing pivot points and applying Στ = 0 and ΣF = 0, unknown forces and tensions can be determined.
Outlines

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنMindmap

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنKeywords

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنHighlights

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنTranscripts

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنتصفح المزيد من مقاطع الفيديو ذات الصلة
Equilibrium of Rigid Bodies (2D - Coplanar Forces) | Mechanics Statics | (Solved examples)
FISIKA KELAS XI || Kesetimbangan || DINAMIKA ROTASI & KESETIMBANGAN BENDA TEGAR
F23 - Kesetimbangan Benda Tegar ,cara mudah memahami.

FÁCIL e RÁPIDO | INTERVALOS REAIS | UNIÃO | INTERSEÇÃO e DIFERENÇA

Pythagoras (1) - Pengenalan Teorema Pythagoras, Pythagoras Theorem - Matematika SMP
Sistem Persamaan Linear Tiga Variabel (SPLTV) membuat model matematika | by Iga Apriliana Mahardika
5.0 / 5 (0 votes)
