Model Predictive Control Design Parameters | Understanding MPC, Part 3
Summary
TLDRThis video explores the critical parameters in Model Predictive Controller (MPC) design, including sample time, prediction horizon, control horizon, constraints, and weights. It explains how selecting optimal values for these parameters impacts both controller performance and computational complexity. Key recommendations include balancing sample time to match system rise time, choosing a prediction horizon that covers significant system dynamics, and adjusting the control horizon to minimize complexity while maintaining performance. The video also highlights the importance of handling constraints—both soft and hard—and appropriately assigning weights to different system goals to achieve optimal control strategies.
Takeaways
- 😀 Proper selection of MPC design parameters impacts both controller performance and computational complexity.
- 😀 The sample time should balance controller reaction speed with computational load; ideally, it should fit 10-20 samples within the open-loop system rise time.
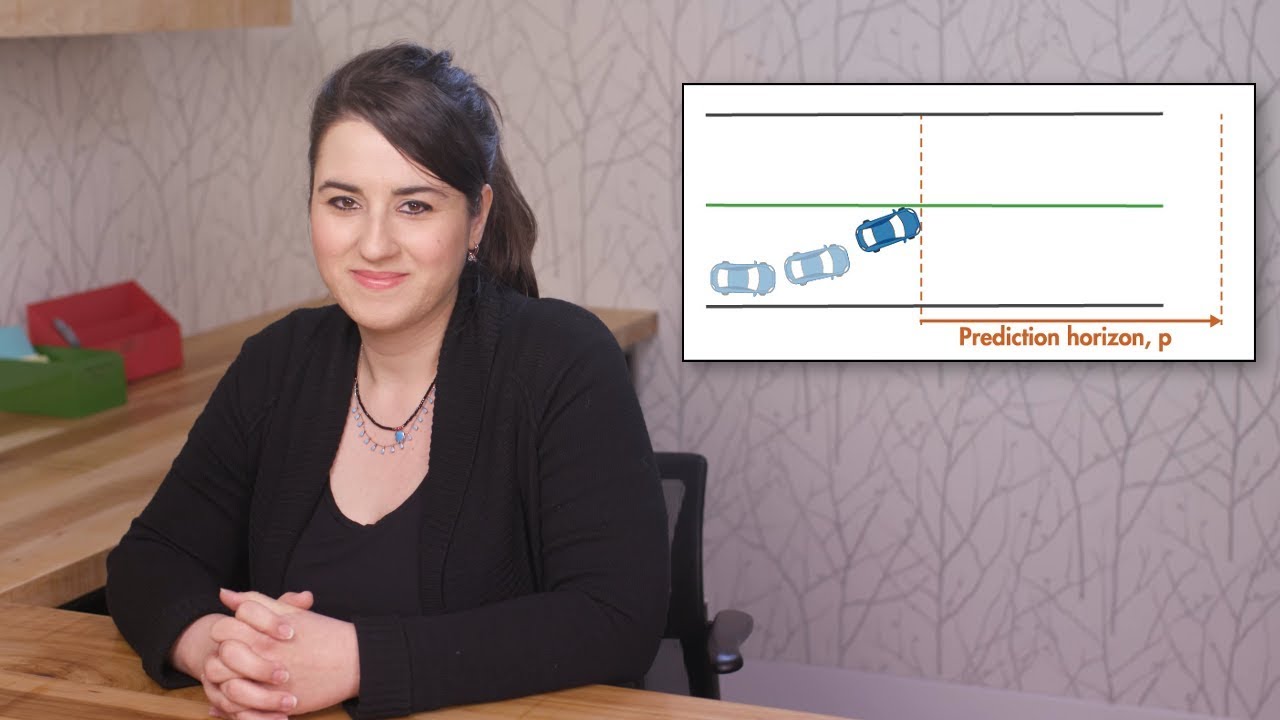
- 😀 The prediction horizon should cover the significant dynamics of the system to allow proper control responses, with 20-30 samples recommended.
- 😀 A prediction horizon that is too short can lead to suboptimal decisions (e.g., reacting too late to traffic lights), while a horizon too long wastes computations due to unforeseen disturbances.
- 😀 The control horizon defines the number of future control moves, impacting computational complexity. A good rule is to set it to 10-20% of the prediction horizon.
- 😀 Larger control horizons can improve predictions but increase complexity, so only the first few control moves have a significant effect on the output.
- 😀 Constraints can be applied to inputs, output rates, and outputs. Hard constraints must not be violated, while soft constraints can be relaxed if necessary.
- 😀 Using hard constraints on both inputs and outputs can lead to infeasibility in optimization problems, especially when there are conflicting constraints.
- 😀 For better optimization, avoid hard constraints on both inputs and rate-of-change of inputs; output constraints should generally be soft.
- 😀 Weights in MPC can be used to balance multiple goals, such as minimizing control aggressiveness while tracking setpoints accurately. Adjusting weights helps achieve this balance.
- 😀 The choice of weights in MPC also affects how different system outputs are prioritized, with higher weights assigned to more critical outputs.
Q & A
Why is choosing the proper sample time important in MPC design?
-The sample time affects both controller performance and the computational complexity of the MPC algorithm. A sample time that's too large won't allow the controller to react quickly to disturbances, while one that's too small increases computational load.
What is the recommendation for choosing the sample time in MPC design?
-The recommendation is to fit 10 to 20 samples within the rise time of the open-loop system response to balance performance and computational effort.
How does the prediction horizon affect the performance of an MPC controller?
-The prediction horizon determines how far the controller looks ahead. If it's too short, the controller may not have enough time to react appropriately to disturbances. However, a prediction horizon that's too long can lead to wasteful computations due to unpredictable changes in the system.
What is the recommended range for the prediction horizon in MPC design?
-The recommendation is to have a prediction horizon of 20 to 30 samples that cover the open-loop transient system response.
Why don't we choose a much longer prediction horizon in MPC?
-A longer prediction horizon can lead to unnecessary computations as unexpected disturbances, such as obstacles or road conditions, might invalidate part of the prediction, leading to wasted effort.
What is the role of the control horizon in MPC design?
-The control horizon defines how many future control moves the optimizer will consider. A smaller control horizon reduces computations, but too small a horizon may not yield the best control maneuvers.
What is the optimal control horizon size in MPC?
-A good rule of thumb is to set the control horizon to 10 to 20% of the prediction horizon, with a minimum of 2 to 3 steps.
What is the difference between soft and hard constraints in MPC?
-Hard constraints cannot be violated, while soft constraints can be violated under certain conditions. Soft constraints are typically used for outputs in MPC to avoid unfeasible solutions in optimization problems.
Why is it not recommended to have hard constraints on both inputs and outputs in MPC?
-Hard constraints on both inputs and outputs can conflict with each other, leading to an unfeasible solution. For example, if the speed is constrained too strictly, the optimizer may fail to find a solution if it cannot meet both input and output limits.
How does weighting affect MPC control performance?
-Weighting helps balance multiple competing goals in MPC, such as output tracking and smooth control. It allows the designer to prioritize certain goals, like giving more importance to one output over another, based on system requirements.
Outlines

此内容仅限付费用户访问。 请升级后访问。
立即升级Mindmap

此内容仅限付费用户访问。 请升级后访问。
立即升级Keywords

此内容仅限付费用户访问。 请升级后访问。
立即升级Highlights

此内容仅限付费用户访问。 请升级后访问。
立即升级Transcripts

此内容仅限付费用户访问。 请升级后访问。
立即升级浏览更多相关视频
What is Model Predictive Control? | Understanding MPC, Part 2

How To Run Model Predictive Control Faster | Understanding MPC, Part 5
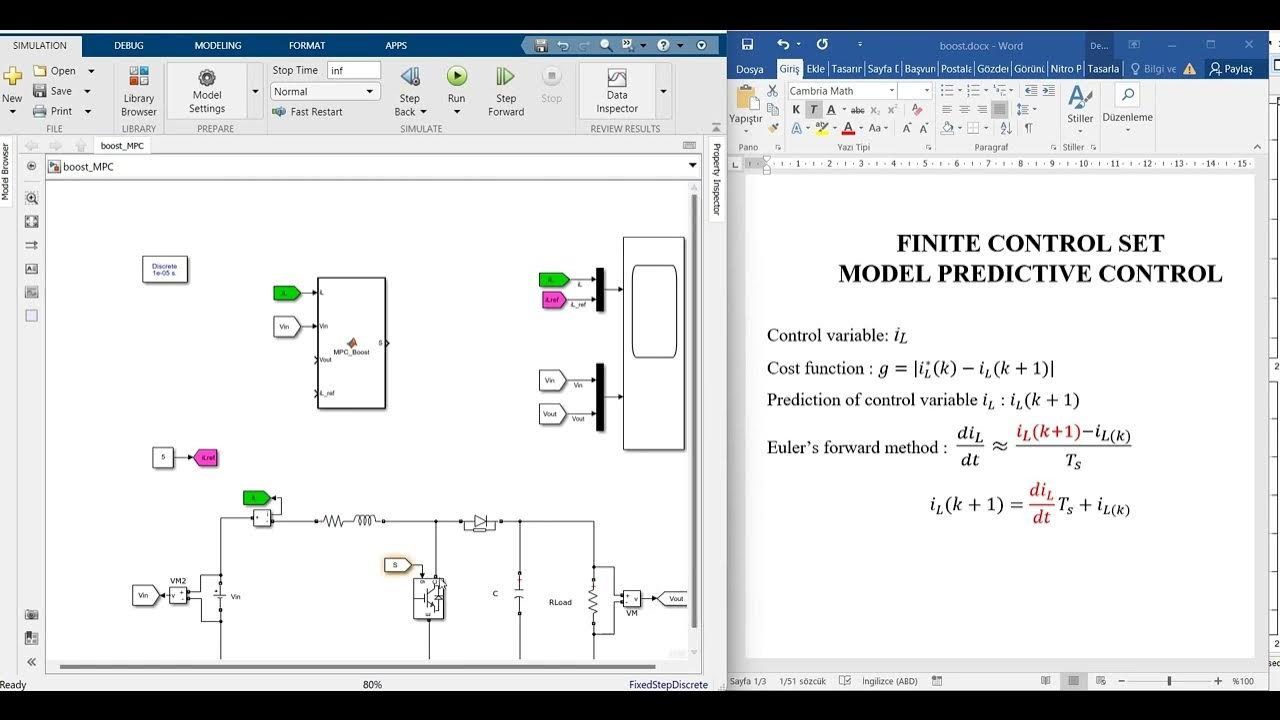
Model Predictive Control of Boost Converter

Why Use Model Predictive Control? | Understanding MPC, Part 1

Adaptive, Gain-Scheduled and Nonlinear Model Predictive Control | Understanding MPC, Part 4

Why Forza Horizon 4 is Being Chosen to Play Over FH5 Now...
5.0 / 5 (0 votes)
