Modern Robotics, Chapter 13.2: Omnidirectional Wheeled Mobile Robots (Part 1 of 2)
Summary
TLDRThis video explains the mechanics of omnidirectional mobile robots, focusing on robots using omniwheels and mecanum wheels. It details how these wheels, allowing free sliding in specific directions, enable a robot to move in multiple directions without skid or slip. The video walks through the kinematic modeling of wheel velocities, demonstrating how the H matrix is used to control motion for both 3-wheel omni and 4-wheel mecanum robots. It emphasizes the importance of full-rank matrices to avoid wheel skidding, and concludes with an introduction to motion planning and control for omnidirectional robots.
Takeaways
- 😀 Wheeled mobile robots use either conventional wheels, omniwheels, or mecanum wheels to move in various directions.
- 😀 Omniwheels allow sliding in the direction perpendicular to the wheel's driving direction, while mecanum wheels allow sliding at a 45-degree angle.
- 😀 Robots with omnidirectional capabilities can either use omniwheels or mecanum wheels, but their control mechanisms differ.
- 😀 A kinematic model is used to calculate the wheel velocities required to achieve a desired chassis velocity.
- 😀 Each wheel has a driving direction, defined by an angle relative to the robot’s body frame, and allows free sliding in a specific direction based on the wheel type.
- 😀 The kinematics of the robot involve calculating the total velocity at the wheel's center by combining driving velocity and free-sliding velocity.
- 😀 The relationship between wheel velocities and chassis velocities is represented by the H matrix, which must be full rank for stable motion.
- 😀 A 3-wheel robot using omniwheels can freely select wheel speeds without causing skidding, as the H matrix for this configuration is 3x3 and full rank.
- 😀 A 4-wheel robot with mecanum wheels requires precise control of wheel speeds to avoid skidding because the H matrix is 4x3 and not square.
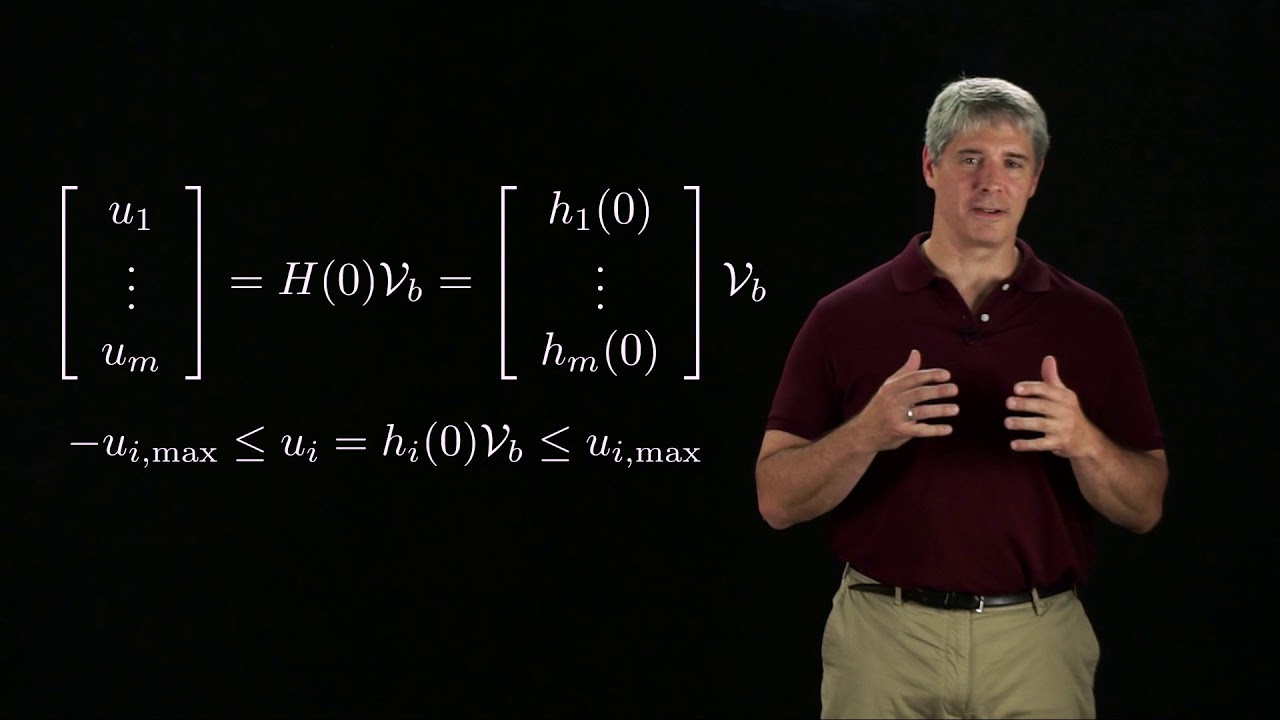
- 😀 To calculate the wheel velocities for a mecanum robot, the H matrix is multiplied by the chassis velocity vector (V_b).
- 😀 The H matrix-based model is essential for achieving specific motions, such as forward, sideways, or rotational movements, by adjusting the wheel speeds accordingly.
Q & A
What are the main differences between omniwheels and mecanum wheels?
-Omniwheels allow free sliding in a direction perpendicular to their driving direction, while mecanum wheels allow free sliding at a 45-degree angle relative to their driving direction. Both types of wheels are used in omnidirectional robots but differ in the direction of free sliding.
How are robots with omniwheels controlled?
-Robots with omniwheels are typically controlled by adjusting the forward or backward movement of each wheel. The wheels are designed to prevent slipping in the driving direction, allowing for omnidirectional movement.
What is the significance of the H matrix in controlling wheeled robots?
-The H matrix represents the kinematic relationship between the chassis velocity and the wheel velocities of a robot. It is crucial for determining the required wheel speeds to achieve a desired chassis movement. The matrix must be full rank (rank 3) for the control system to function without wheel skidding.
What does it mean for the H matrix to be 'full rank'?
-For the H matrix to be full rank means that it has a rank of 3, ensuring that the system can be controlled effectively. If it is not full rank, the robot's wheels may skid due to insufficient control over the velocities.
What is the difference between the kinematics of a 3-omniwheel robot and a 4-mecanum wheel robot?
-A 3-omniwheel robot has a 3x3 H matrix, meaning its wheel speeds can be chosen more freely without causing skidding. A 4-mecanum wheel robot, with a 4x3 H matrix, requires more precise control of wheel speeds to avoid skidding, as the wheels' directions of free sliding are not aligned.
How is the linear velocity of a wheel calculated in omnidirectional robots?
-The linear velocity of a wheel is derived from the chassis's body twist (V_b) and depends on the wheel's position relative to the robot's chassis. This velocity includes both the driving velocity and the free-sliding velocity.
What is the role of the vector h_i in the kinematic model?
-The vector h_i represents the relationship between the wheel's velocity and the chassis's velocity. It is used in calculating the required wheel speeds (u) to achieve a desired chassis velocity.
Why is it necessary for the sliding directions of the mecanum wheels to not be aligned?
-If the sliding directions of all the mecanum wheels were aligned, the H matrix would not be full rank, preventing proper control and causing the wheels to skid. The sliding directions need to be configured at different angles for full rank and effective control.
What is the function of the matrix H_phi in the context of kinematic modeling?
-The matrix H_phi is a transformation of the H matrix that incorporates the rotation matrix to relate the wheel velocities to the rates of change of the robot's coordinates (q-dot). This provides a more direct way to calculate wheel speeds from the robot's motion commands.
How does the H matrix relate to the motion planning and control of omnidirectional robots?
-The H matrix is crucial for determining the correct wheel speeds to achieve the desired motion in an omnidirectional robot. By ensuring the matrix is full rank, it allows the robot to move smoothly without skidding, which is essential for accurate motion control in complex environments.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video



5.0 / 5 (0 votes)