What is Model Predictive Control? | Understanding MPC, Part 2
Summary
TLDRIn this video, we explore Model Predictive Controllers (MPC) and how they work to control a system, such as an autonomous car, to follow a desired reference. MPC predicts the system's future behavior using a model and an optimizer, adjusting control inputs like the steering wheel angle. The controller minimizes errors between the predicted and desired paths while considering constraints such as steering limits and safety boundaries. The process is repeated in a receding horizon manner, continuously adjusting the control inputs for optimal performance. The video introduces key MPC concepts, including prediction horizons, optimization, and constraints, using the car example to illustrate them.
Takeaways
- 😀 MPC (Model Predictive Control) predicts future plant outputs using a model of the system to determine optimal inputs.
- 😀 The goal of an MPC is to compute inputs that ensure the plant output follows a desired reference trajectory.
- 😀 In the car example, the MPC controls the lateral position of the car by adjusting the steering wheel angle.
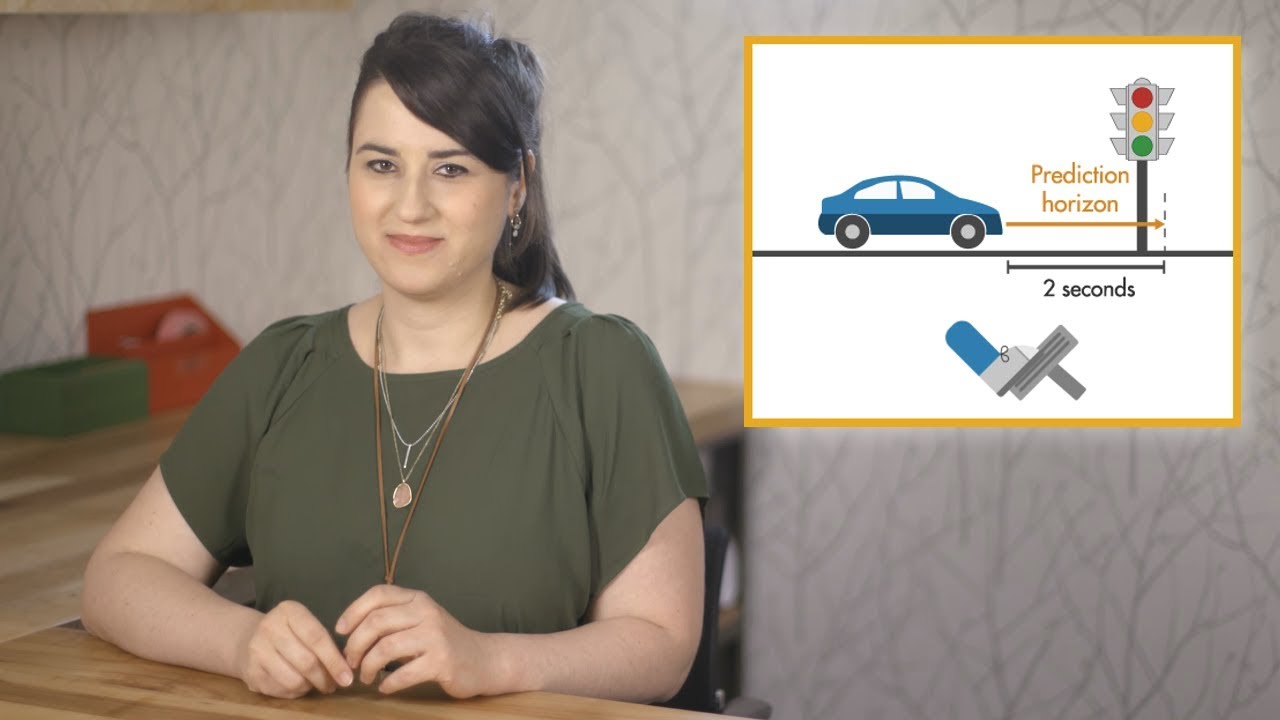
- 😀 The prediction horizon (P) determines how far into the future MPC looks to predict plant behavior and plan the optimal control sequence.
- 😀 An optimizer within the MPC solves an optimization problem to minimize the error between the predicted path and the reference.
- 😀 MPC also minimizes the change in the control input (steering wheel angle) to avoid abrupt changes and ensure comfort for passengers.
- 😀 Constraints, such as limits on steering angle and vehicle position, are incorporated into the MPC to prevent unsafe behavior (e.g., going off-road).
- 😀 MPC uses a receding horizon approach, meaning it recalculates the optimal control sequence at each time step based on updated measurements.
- 😀 At each time step, the MPC applies only the first step of the optimal control sequence and disregards the rest until the next iteration.
- 😀 State estimators may be used in MPC when the system's state can't be directly measured, allowing the controller to estimate missing information.
- 😀 The next video in the series will discuss MPC design and related parameters like sample time, prediction horizon, control horizon, constraints, and weights.
Q & A
What is the primary goal of a model predictive controller (MPC)?
-The primary goal of an MPC is to calculate the input to a plant so that the plant's output follows a desired reference.
How does an MPC predict future behavior?
-MPC uses a model of the plant to predict the future behavior of the plant's output. This prediction helps the controller make decisions about future inputs.
What is the prediction horizon in MPC?
-The prediction horizon (denoted as 'P') is the measure of how far ahead the MPC looks into the future. It represents either the length of time or the number of future time steps the controller considers.
How does the MPC controller ensure the car stays in the center of the lane?
-The MPC controller adjusts the steering wheel angle based on the car's model and predicted future paths, aiming to keep the car as close as possible to the reference, which is the center of the lane.
What is the role of the optimizer in MPC?
-The optimizer in MPC solves an optimization problem that minimizes the error between the predicted future output and the desired reference. It also minimizes changes in the control inputs (e.g., steering angle) to ensure smooth operation.
What does the cost function in MPC typically include?
-The cost function in MPC includes terms that represent the predicted errors between the desired and actual outputs, as well as the changes in the steering wheel angle from one time step to the next.
What constraints does MPC consider during optimization?
-MPC considers constraints such as the maximum allowable steering wheel angle and limits on the car's position to ensure the vehicle stays within the lane and avoids accidents.
Why does the MPC controller apply only the first step of the optimal sequence?
-The MPC controller applies only the first step of the optimal sequence to the car at each time step, then reassesses the situation based on the latest measurements before calculating the next optimal step.
What is receding horizon control in MPC?
-Receding horizon control refers to the forward-moving nature of the prediction horizon in MPC. As each time step progresses, the prediction horizon shifts forward by one step, and the optimization process is recalculated.
What is the role of a state estimator in MPC?
-A state estimator is used when the states of a system cannot be directly measured. It estimates the system's states and feeds these estimates back to the MPC controller to improve its performance and accuracy.
Outlines

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードMindmap

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードKeywords

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードHighlights

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードTranscripts

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレード関連動画をさらに表示

Why Use Model Predictive Control? | Understanding MPC, Part 1

How To Run Model Predictive Control Faster | Understanding MPC, Part 5

Adaptive, Gain-Scheduled and Nonlinear Model Predictive Control | Understanding MPC, Part 4
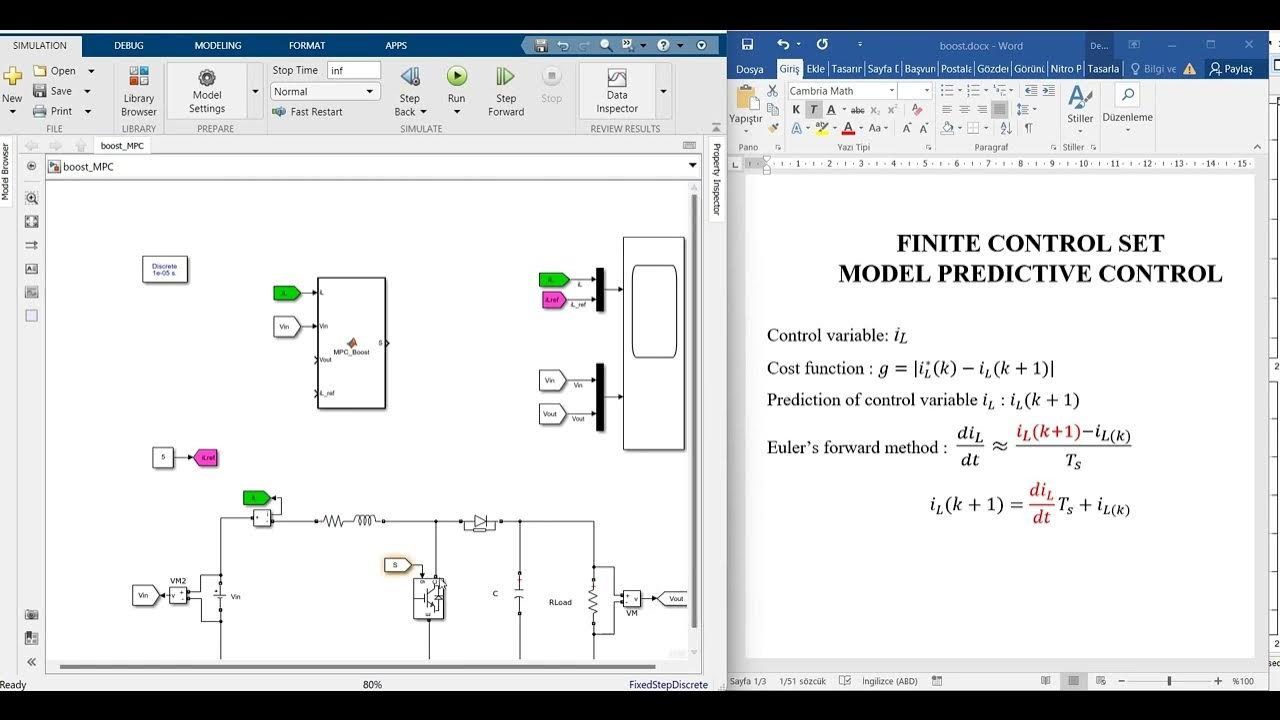
Model Predictive Control of Boost Converter
Model Predictive Control Design Parameters | Understanding MPC, Part 3

Introduction to PID Controllers
5.0 / 5 (0 votes)
