How To Run Model Predictive Control Faster | Understanding MPC, Part 5
Summary
TLDRThis video discusses practical tips for improving the efficiency of Model Predictive Control (MPC) in real-time applications. Using the pancake metaphor, the video highlights the complexity of MPC, emphasizing challenges like limited resources, computational demands, and memory constraints. Techniques such as model order reduction, shorter horizons, and explicit MPC are explored to speed up computations and reduce memory usage. The video also covers suboptimal solutions for faster execution, explaining how to balance optimality and speed. Ultimately, the video offers strategies for deploying MPC in applications with small sample times, including autonomous vehicles.
Takeaways
- 😀 MPC is computationally complex due to the online optimization problem solved at each time step, which involves minimizing a quadratic cost function.
- 😀 As the number of states, constraints, and horizons increase, the complexity of MPC computations grows significantly.
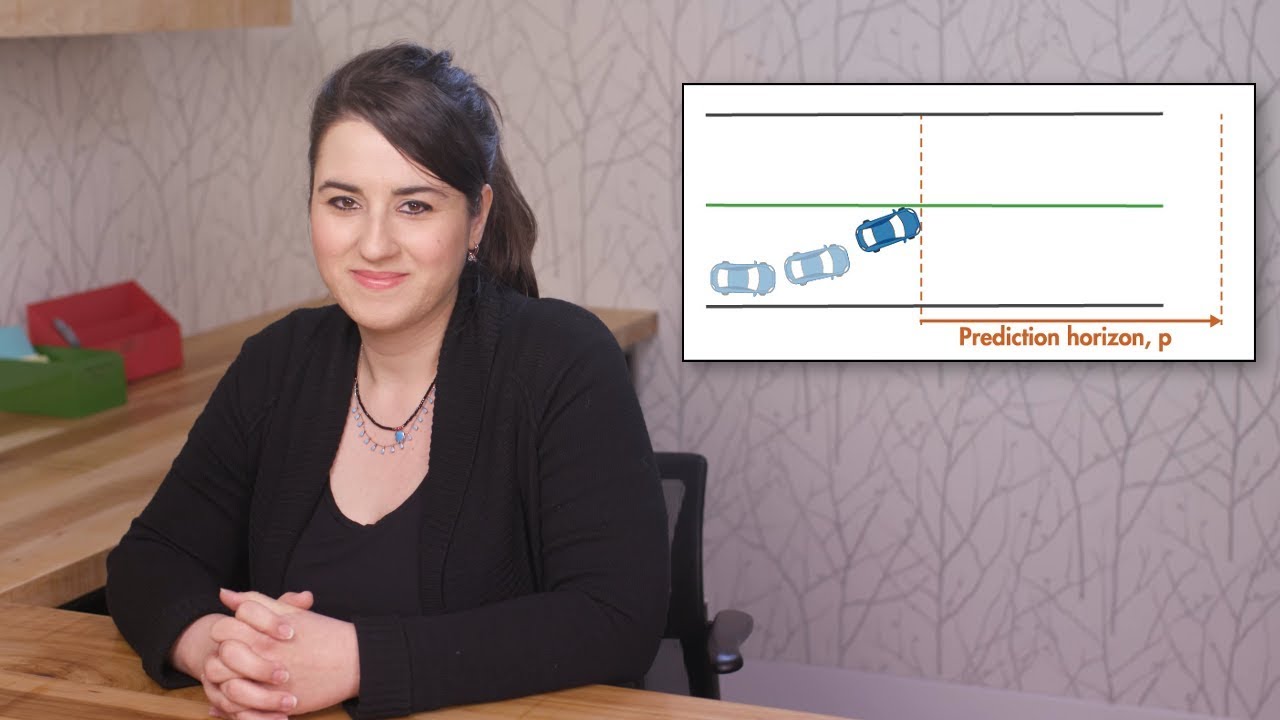
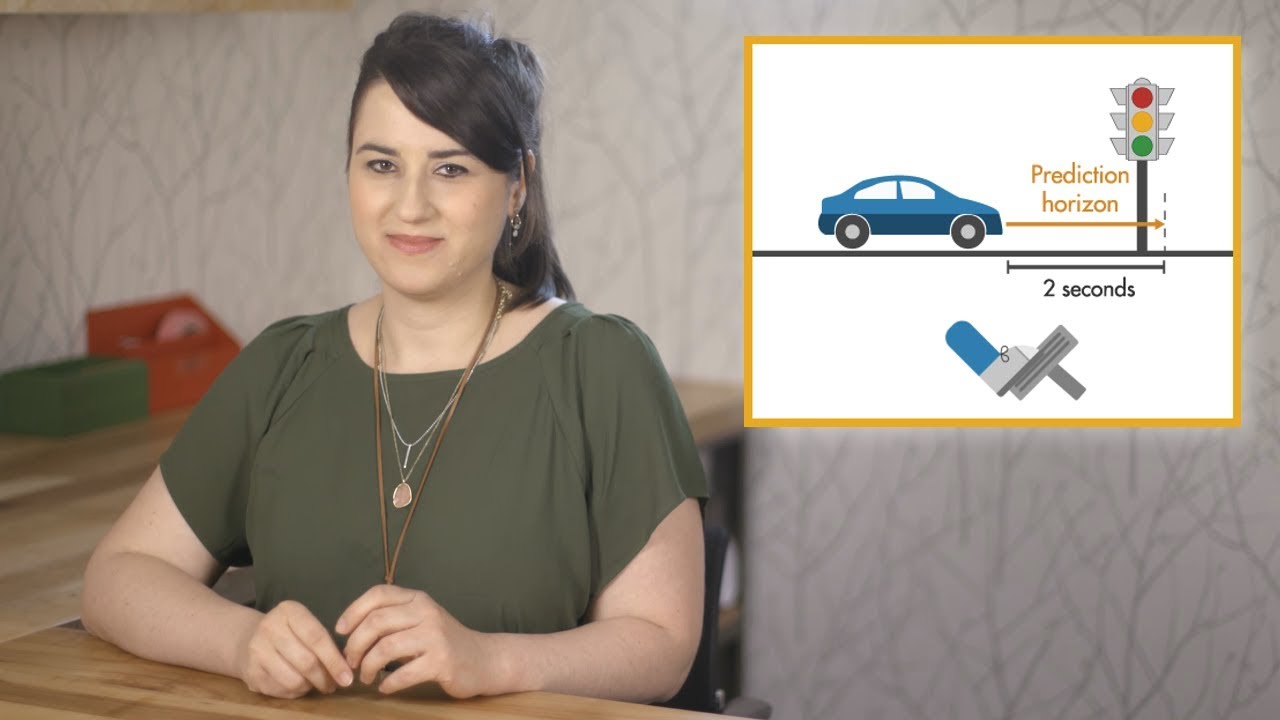
- 😀 In applications like autonomous vehicles, MPC needs to solve optimization problems within milliseconds, requiring careful optimization to meet timing constraints.
- 😀 Limited memory in embedded hardware can be an issue for MPC, as the matrices for computations grow rapidly with increasing optimization variables.
- 😀 To reduce computation time and memory usage, model order reduction techniques can be applied to discard states that don't contribute significantly to the system dynamics.
- 😀 Shortening the control and prediction horizons, reducing the number of constraints, and using lower-precision operations can further optimize MPC performance.
- 😀 Explicit MPC can be a solution for very fast applications, as it solves the optimization offline and then uses precomputed solutions for faster execution.
- 😀 In explicit MPC, the optimization solution is piecewise affine and continuous in x, which reduces the online computations to linear function evaluation.
- 😀 Managing a wide range of regions in explicit MPC can lead to large memory requirements and slower solution searches, but merging regions can reduce memory use at the cost of optimality.
- 😀 Suboptimal solutions can be used to ensure that the optimization is completed within the controller's sample time, even if it isn't the optimal solution.
- 😀 By determining a maximum number of iterations based on execution time, suboptimal solutions can be used to meet timing constraints while still satisfying the optimization problem's requirements.
Q & A
What is Model Predictive Control (MPC) and why is it computationally complex?
-Model Predictive Control (MPC) is an advanced control strategy that solves an online optimization problem at each time step. Its complexity arises because it involves minimizing a quadratic cost function while considering multiple states, constraints, and prediction horizons. The computational effort increases as the number of optimization variables grows.
How does the pancake metaphor relate to the complexity of MPC?
-The pancake metaphor is used to illustrate the complexity of MPC. Just as preparing pancakes requires multiple steps, such as mixing ingredients, cooking, and serving, MPC involves preparing, solving, and applying an optimization problem at each time step, which can be computationally intensive.
What are some factors that increase the computational complexity of MPC?
-Factors that increase the complexity of MPC include the number of states, constraints, and the length of both the control and prediction horizons. These elements make the optimization problem more difficult to solve and require more computational resources.
Why is memory a concern when implementing MPC on embedded hardware?
-Memory becomes a concern because the matrices involved in MPC computations grow rapidly with the increase in the number of optimization variables. This can quickly exhaust the available memory on embedded hardware, especially in applications with real-time constraints like autonomous vehicles.
What is model order reduction, and how does it help in reducing MPC complexity?
-Model order reduction is a technique used to discard states that do not significantly affect the dynamics of the system. By focusing only on the relevant states, the computational complexity and memory usage of the MPC controller are reduced, allowing for faster execution.
How can the control and prediction horizons impact the performance of MPC?
-Shortening the control and prediction horizons can reduce the computational burden of MPC. A shorter horizon means fewer optimization variables to handle, which reduces the amount of computation required for each time step, thereby increasing throughput.
What is explicit MPC, and how does it differ from traditional MPC?
-Explicit MPC is an approach where the optimal control actions are precomputed offline for all states within a given range. Unlike traditional MPC, which solves an optimization problem online, explicit MPC evaluates precomputed linear functions at runtime, making it faster and more suitable for systems with very small sample times.
What are the potential drawbacks of using explicit MPC in terms of memory and computational time?
-The main drawbacks of explicit MPC are the large memory requirements to store the precomputed solutions for all regions, and the time required to search for the region corresponding to the current state. These challenges increase as the number of regions grows, making explicit MPC less ideal for systems with wide state ranges.
What is the significance of using a suboptimal solution in MPC, and when should it be applied?
-A suboptimal solution in MPC is used to ensure that computations are completed within a fixed sample time, even if the optimal solution is not found. It is applied when the number of iterations to find the optimal solution exceeds the available time. This ensures that the system still meets constraints and can operate within real-time limits.
How can the maximum number of optimization iterations be determined for a system?
-The maximum number of optimization iterations can be determined by testing the MPC algorithm on the hardware and measuring the execution time per iteration. Based on this, the maximum number of iterations can be set such that the total execution time does not exceed the sample time, leaving room for other tasks to be executed.
Outlines

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenMindmap

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenKeywords

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenHighlights

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenTranscripts

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenWeitere ähnliche Videos ansehen
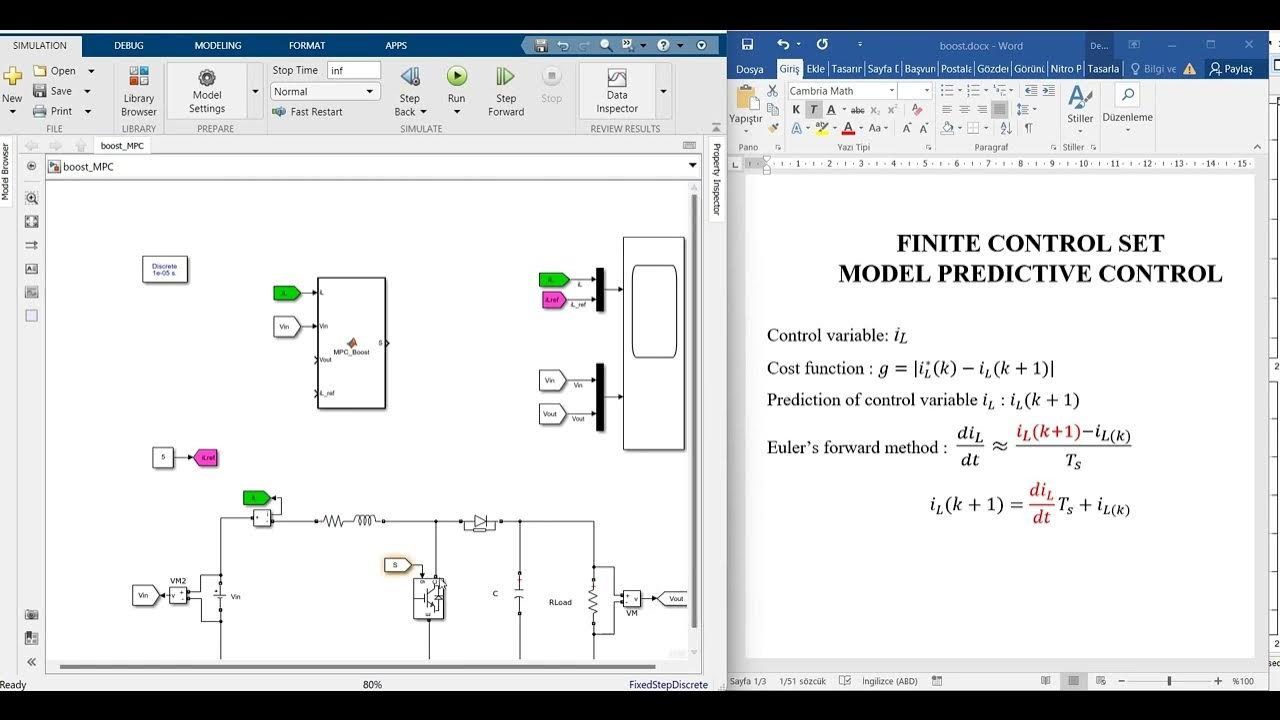
Model Predictive Control of Boost Converter

Adaptive, Gain-Scheduled and Nonlinear Model Predictive Control | Understanding MPC, Part 4

Why Use Model Predictive Control? | Understanding MPC, Part 1
What is Model Predictive Control? | Understanding MPC, Part 2
Model Predictive Control Design Parameters | Understanding MPC, Part 3

Development of a cloud-based IoT system for livestock health monitoringusing AWS and python - K2
5.0 / 5 (0 votes)
